本文是一篇机械论文,本文研究主要是针对车辆纵向控制下的单向通信拓扑结构和通信中断情况进行研究,在保证行驶车辆安全和稳定的前提下,改进了车辆经济性、追踪性和舒适性,给出了如何应对通信中断下的队列控制,并对不足之处进行改进。
1 绪论
1.1 研究背景与意义
在新的科学技术引领下,人工智能、智能驾驶、大数据和5G通信网络技术的快速发展,对传统的各个行业产生了极大的影响,特别是对传统汽车行业造成了颠覆性的影响。据公安部最新数据统计,截止到2023年9月,全国机动车保有量达到4.3亿辆,然而在汽车保有量快速增长之下,会造成城市交通拥堵、行车安全和能源消耗等一系列问题,如何解决交通拥堵已成为非常迫切的问题[1]。除了交通拥堵之外,交通事故的频繁发生更加严重,据统计全球每年死于交通事故的人高达50万人,主要原因是驾驶员自身问题,发生事故的原因常常伴有超速、疲劳驾驶、不遵守交通法规和随意变道等,因此促进汽车智能化的进步具有深远的影响[2]。智能交通系统(Intelligent Transport System,ITS)涉及非常多的方面,包括控制、通信和信息处理等前沿领域,人们希望能够利用先进的控制技术提高交通吞吐量,以此来改善交通出行[3]。随着车辆智能化和通信技术的迅速发展,车-车和车-路协同技术得以顺利实现,使智能车能快速做出反应,减少交通事故的发生,同时进一步加快了智能交通系统的发展。
实现智能辅助驾驶,第一阶段是先发展高级驾驶辅助系统(Advanced Driver Assistant System,ADAS),ADAS通过传感器检测周围事物来获取状态信息,进行分析与决策。目前经过了几十年的发展和完善,ADAS在提高交通效率、改善乘坐体验、降低能源消耗和提高安全性等方面已经取得了重大突破。自适应巡航控制(Adaptive Cruise Control,ACC)是ADAS中最为典型的一种辅助驾驶系统,并且到目前为止,自适应巡航控制技术已经相对成熟,在一些高端车中已经装备了较为完善的ACC控制系统,制造商正在将其扩展到中端车中。目前生产的高端车辆大多配有L2等级的驾驶辅助系统,L1~L2级是人类驾驶为主体,L3级以上主体才是智能车,要实现完全自动驾驶,还需要先进技术达到跨越式的进步。
........................
1.2 国内外研究现状
车联网最先是由欧美国家开始研究的,因此国外起步相对较早[5]。早在1986年,美国加州大学伯克利分校开展了第一个CACC项目研究。1989年,PATH与福特公司合作,研发了由四辆网联车组成的车队,并进行试验。1997年8月,PATH将车辆增加到八辆,同时邀请大概1000人试车[6]。到了21世纪初,PATH又与沃尔沃合作,将CACC不仅仅局限于乘用车,将其应用到卡车领域,目的是提高卡车的经济性。事实证明CACC相对于ACC具有更好的乘坐体验,并且乘客也充分信任CACC系统,都选取了较小的车间时距。乘客普遍认为ACC适合非拥堵路段,CACC比较适合拥堵路段,但是总体而言乘客对车辆队列所能提供的短距离跟车非常看好。
日本开展的车辆协同控制项目在2008年开始,最具代表性的是Energy ITS项目,选用的车辆是重型卡车,目的是实现车队的节能减排[7]。选用卡车编队有以下原因:卡车主要用于运输货物,并且使用时间较长,而且卡车司机驾驶经验丰富,能够快速适应自动驾驶技术;卡车司机长时间的驾驶很容易造成疲劳现象,车辆队列行驶能够极大程度降低驾驶负荷;卡车体积较大,发生事故时造成的经济损失较为严重,通过车辆协同控制进一步提高行驶安全。Energy ITS项目开展了队列的横纵向控制研究,间距策略采用的是恒定车间距,车间距为10m,实现了队列的换道、跟车和转向等,并在2010年3月进行试验,队列规模是三辆重型卡车[4]。
...........................
2 车辆协同控制系统架构
2.1 CACC系统组成
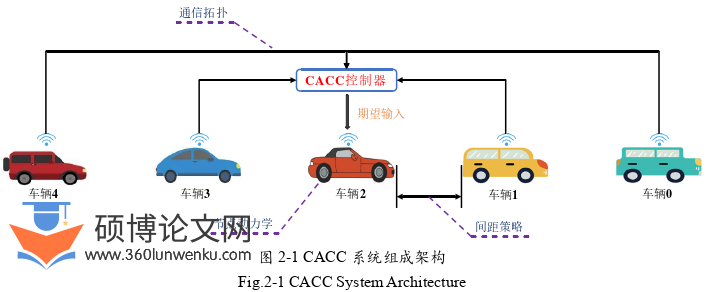
CACC主要分为车辆纵向动力学模型、通信拓扑结构、间距策略和协同自适应巡航控制器四部分。CACC系统组成架构如图2-1所示。
机械论文怎么写
(1)车辆纵向动力学系统具有很强的非线性,在行驶过程中受到如空气阻力、轮胎滚动阻力和路面坡度的影响。因此在面对复杂的车辆动力学模型时,往往采用分层控制,主要分成上层控制和下层控制。
(2)通信拓扑结构是通过互联网将车辆联系起来的物理布局,它体现了车队内部的信息流通方式,不同的通信拓扑结构能够体现不同的控制效果,并且对车队的稳定性有很大的影响。
(3)间距策略是车辆在行驶过程中的相邻车辆的距离,它能够计算出车辆的期望车间距,从而保证行驶途中车间距收敛于期望车间距。目前间距策略主要分为恒定车间距和可变车间距。
恒定车间距是车辆在行驶途中始终保持与前车的距离不变,无论车辆处于加速或减速阶段,该策略在很大程度上能够保证交通的通行率,但是与驾驶员的驾驶风格很不符合,行驶途中遇到人工驾驶车辆容易引起事故。
.......................
2.2 上层控制器设计
上层控制将车辆动力学模型进行简化处理,忽略行驶途中各种阻力带来的影响,采用一阶惯性传递函数表示,来替代高度复杂的非线性系统。每辆车通过获取前行车辆的信息(距离、速度、相对速度和加速度等)来决策车辆输出的期望加速度,并将其传递给下层控制。
2.2.1 CACC纵向动力学建模
如图2-3所示车辆纵向排列,通过纵向动力学建模,体现了每辆车的位置、车身长度、车间距和间距误差,其中N+1辆车均为智能网联车。每辆车都有各自独立的控制器,整个队列中包含一辆领头车i=0和跟随车编号为i=1~N,采用前车-跟随式通信拓扑结构来表达车辆之间的信息流动,每辆车都可以通过V2V通信技术来实时的接收前行车的状态信息。
2.2.2 模型预测控制算法
模型预测控制(Model Predictive Control,MPC)由模型预测、滚动优化和反馈矫正三个核心环节构成。模型预测是根据系统当前的状态和外界扰动来对未来的控制输入计算,并将计算得出控制输入作用于系统,来预测未来系统的状态。滚动优化是MPC区别于其它最优控制算法的最大区别,MPC采用的并不是全局不变的优化目标,而是滚动式的有限时域的局部目标。每一个采样时刻都预测到未来的预测时域,到下一时刻这个预测时域同时向前移动,这就是反复滚动。由于任何预测模型都不可能非常精确的预测出系统的状态,都会受到外界不确定性因素干扰,影响预测精度。反馈矫正是将当前时刻实际状态与预测状态差值作为模型的误差,将其反馈到下一时刻,提高模型预测的精确度
.......................
3 事件触发通信拓扑结构研究 ............................. 23
3.1 单向通信拓扑结构分析......................... 23
3.2 事件触发通信拓扑结构.............................. 24
4 通信中断下的CACC控制器 ............................... 35
4.1 IDM跟车模型 ........................................ 35
4.2 车辆通信中断情景分析............................ 36
5 仿真验证与分析 ............................. 47
5.1 联合仿真平台搭建 ................................... 47
5.1.1 PreScan模型搭建 ................................ 47
5.1.2 仿真场景搭建 ................................. 50
5 仿真验证与分析
5.1 联合仿真平台搭建
Simcenter Prescan是2006年西门子公司开发的自动驾驶业务单元的专业仿真软件,是业内最早致力于ADAS和自动驾驶仿真的工具,主要用于ORM主机厂和零部件供应商的仿真测试和产品研发。基于Simcenter Prescan的ADAS/AD仿真系统由场景仿真、传感器仿真、车辆仿真和联合仿真各部分组成。对于场景仿真,Prescan有其相应的模型库来调用,在搭建场景时,使用者可以对所需的场景直接进行拖放,并对其进行参数化设置。而软件本身就内置了130多个交通场景,覆盖了多种ADAS功能,如AEB、LDW、ACC、LKA和APA等。在车辆仿真方面,Prescan内配有三维的车辆动力学模型,包括传动、转向、制动和悬架系统,能够满足大部分ADAS的仿真需求。如果对模型的需求更高的话,Prescan还能与第三方软件或自己搭建的模型进行联合仿真,如CarSim、Simcenter AMEsim等。在传感器方面,搭载了多种传感器模型,包括毫米波雷达、摄像头、激光雷达和V2X等。联合仿真部分是Prescan和Simulink的集成,并且也增加了C/C++接口,使得仿真平台有更好的延展性。
5.1.1 PreScan模型搭建
Prescan主要包括四个用户模块,分别为Prescan GUI、Prescan Sim、Prescan Viewer和Prescan Manager,如图5-1所示。
机械论文参考
............................
6 结论与展望
6.1 结论
随着通信网络和V2X技术的发展,智能车辆控制研究有了巨大的进步,协同式自适应巡航控制在未来的交通出行方面起着决定性的作用。本文研究了模型预测控制算法下的多种通信拓扑结构的性能情况,为了提高系统的经济性、舒适性和追踪性,提出了一种事件触发通信拓扑结构,提高各个性能的同时,也增大了通信资源的利用率。此外,考虑到通信中断情况下车队系统,对通信中断的车队进行情景分析,使其满足稳定和安全的同时,在控制策略切换的过程中设计一段过渡缓冲区,有效的减小了直接切换所带来的剧烈震动,将车辆波动对人体带来的震感保持在感知阈值之内。具体的主要工作和研究结论如下:
(1)对CACC系统进行设计,将其主要分上层和下层控制。在上层控制中采用MPC作为CACC系统的控制器,建立队列纵向动力学模型,将与前车的距离、速度、相对速度和加速度作为状态量,与前车的间距误差、相对速度和加速度作为系统输出来进行建模。为了综合协调各种性能,将控制目标分为经济性、追踪性和舒适性来进行控制,最终将其转化为在线二次规划问题,引入松弛向量法扩展求解可行域。在下层控制中设计油门刹车切换策略、期望节气门开度、PID和前馈控制。
(2)以提高CACC系统的燃油经济性、动态追踪性和驾乘舒适性为目标,提出了以PF型结构间距误差平均值为触发阈值的事件触发通信拓扑结构。首先,分析了目前使用最为广泛的四种单向通信拓扑结构,对比了其性能,分析各自的优势与不足。其次,将提出了ET-PLF和ET-TPF事件触发通信拓扑结构与四种通信拓扑结构进行对比。最后,结果表明ET-PLF在经济性、跟踪性和舒适性方面都有较大改进,队列稳定性也进一步有所提升,增大了通信资源的利用率,ET-PLF型尾车的加速度响应时间滞后量相比LF、PF、TPF和ET-TPF型结构更短。
参考文献(略)