第一章绪论
1.1研究目的与意义
随着系统功能在各领域中的重要性日益增强,计算机软硬件系统也变得越来越复杂并且已经广泛应用于商业或安全相关的领域当中[1]。系统故障往往会引发重大事故,例如,丹佛机场行李处理系统因软件缺陷导致机场开业推迟九个月,每日经济损失高达110万美元;放射治疗机Therac-25控制部分的软件错误造成病人接受治疗时辐射强度过大,在1985-1987年导致了6个癌症病人的死亡,如何验证软硬件系统的可靠性和正确性就显得尤其重要[1,2]。
软硬件系统的验证方法主要有模拟、测试、定理证明和模型检测。在复杂系统的软件和硬件的设计中,往往会把更多的时间和精力放在验证而不是构建上,形式化方法的研究带动了诸多验证技术的发展,能够用于系统验证早期的缺陷检测[1]。形式化方法是一种以数学证明推导为基础的验证方法,能够判定软件系统是否存在某一个方面的错误[2]。一般而言,形式化方法可分为两大类,其中定理证明侧重于逻辑证明,而模型检测是基于系统模型进行验证。研究表明,形式化验证能够找出在阿丽亚娜5号火箭、火星探路者和Therac-25放射治疗机中暴露的问题[1,2]。
模型检测[1–5]是形式化验证的重要方法,思想为用状态转换系统M表示系统模型的行为,使用逻辑公式F描述系统的性质,该系统能否满足此性质的模型检测问题转换为M是否满足逻辑公式F,若满足,通过验证;不满足,返回一个反例[6,7]。模型检测具有自动化验证和全面验证的特点,因此广泛用于嵌入式系统、软件工程和硬件设计等领域,并且以图论算法、数据结构和逻辑等理论作为基础[1,2]。经典模型检测主要包括线性时序逻辑(LTL)模型检测和计算树逻辑(CTL)模型检测等[8,9]。
软件工程论文怎么写
1.2国内外研究现状
模糊模型检测是模型检测的重要延伸,是形式化自动验证的重要技术之一,受到了广大学者的关注。其方向的研究主要包括了系统模型、用于描述系统属性的时序逻辑、模型检测算法及复杂度分析和状态空间约简等内容。下面将从模糊理论应用、定量模型检测和状态空间约简等几个方面的研究现状进行阐述。
1.2.1模糊理论应用的研究现状
随着计算机研究的不断深入,经典数学中“非此即彼”的精确性概念适用范围有所限制,模糊数学作为一门处理模糊性现象的数学分支打破了这一限制,由美国控制论专家L.A.Zadeh在1965年提出,它拓展了经典数学的范畴[12]。模糊集合理论目前已经被广泛用于计算机的各个领域中,并在人工智能[38,39],控制[40–42]和数据挖掘[43,44]等领域取得良好的效果。
在人工智能领域,模糊系统与神经网络的研究一直是热点方向,旨在不断提升模型性能和可解释性。Mantas等人证明了多层前馈人工神经网络与零阶TSK模糊规则系统的功能等价性,通过XOR问题和鸢尾花问题等实例,展示了该等价性在简化网络架构、理解神经网络知识方面的优势,并给出了简化阶TSK模糊规则系统的启发式规则[38]。俞航等人提出拓扑学习模糊随机神经网络,设计了在线拓扑学习算法组织各层结构,学习多个模糊集并引入随机层,采用新的模糊规则和推理方式,能有效检测和适应概念漂移[39]。
.........................
第二章预备知识
2.1模糊集相关理论
在复杂系统的不确定性建模中,模糊集理论为解决信息不完整性提供了数学基础。通过隶属度函数与模糊逻辑的构建,系统能够有效处理传统二值逻辑难以表达的渐变属性。该理论体系中,信息处理机制主要依赖两种核心范式:可能性分布模型侧重对不确定状态的定量刻画,模糊推理系统则融合逻辑运算与近似推理,揭示变量间的非线性关联。引入模糊关系代数与扩展原理,可精确描述系统的属性,为处理模糊信息系统的动态演化建立了完备的数学框架。
定义2.1.设X是经典集合。集合X上的模糊集合A是X到[0,1]区间的一个映射,也被称为模糊集合A的隶属度函数,A(x)表示x属于模糊集A的隶属度,其中x∈X。本文使用F(x)表示X上所有的模糊集合,即F(x)={A|A:X→[0,1]}。
定义2.2.设A,B∈F(x),任意x∈X,A与B的交,并,补的隶属度函数定义如下:(A∩B)(x)=A(x)∧B(x)=min{A(x),B(x)}(A∪B)(x)=A(x)∨B(x)=max{A(x),B(x)}Ac(x)=1−A(x)
..............................
2.2模糊决策过程模型及相关理论
在复杂系统的建模与验证中,模糊决策过程为解决系统行为的不确定性和模糊性提供了有效的工具。通过模糊转移函数和模糊标签函数的构建,系统能够描述状态转移和属性成立的可能性。该理论体系中,模糊决策过程则结合动作选择和状态转移的模糊性,解析系统在不确定性下的动态行为。引入调度函数和模糊矩阵运算,可以精确描述模糊决策过程中的状态转移和路径演化,为分析复杂系统的模糊行为提供了重要的理论框架。因此本文使用模糊决策过程作为系统模型对相关问题展开研究。
2.2.1模糊决策过程系统
定义2.6.模糊决策过程(FDP)常用于复杂模糊系统模型建模,是由状态集合,动作集合,转移函数,原子命题集合,标签函数所组成的一个六元组,Mf=(S,Act,P,I,AP,L);
(1)S为非空可数的状态集;
(2)Act为动作集;(3)P:S×Act×S→[0,1]为模糊转移函数,对于s∈S,α∈Act,有t∈S,使P(s,α,t)>0;
(4)I:S→[0,1]为初始分布函数,对于s∈S,I(s)表示初始状态是s的可能性真值;
(5)AP是原子命题集;
(6)L:S×AP→[0,1]为模糊标签函数,L(s,a)为命题a在状态s上的可能值,其中s∈S,a∈AP。
给定一个模糊决策过程Mf,则称s0α0s1α1s2···∈π是s0出发的无限路径当且仅当对于任意的i有P(si,αi,si+1)>0,其中π表示S上所有无限序列的集合。
..................................
第三章模糊分支时态逻辑模型检测方法·····························-17
3.1模糊分支时态逻辑语法及语义·······························-17
3.2模糊分支时态逻辑模型检测·································-18
第四章模糊最大可能性互模拟···························-35
4.1模糊最大可能性互模拟····································-35
4.2模糊最大可能性互模拟相关性质·························-43
第五章动作模糊互模拟与状态模糊互模拟·······················-51
5.1动作模糊互模拟与状态模糊互模拟的定义··················-51
5.2基于动作集合的握手机制······················-52
第五章动作模糊互模拟与状态模糊互模拟
5.1动作模糊互模拟与状态模糊互模拟的定义
在本小节中给出动作的模糊互模拟定义和状态的模糊互模拟定义。
定义5.1.动作模糊互模拟:设MActfi=(Si,Act,Pi,Ii,APi,Li)是基于动作集合Act的模糊决策过程,其中i=1,2。(MActf1,MActf2)是基于动作的互模拟,等价满足以下条件二元关系RAct⊆S1×S2:
(1)∀s1∈I1,∃s2∈I2,(s1,s2)∈R且有∀s2∈I2,∃s1∈I1,(s1,s2)∈RAct。(2)P1Adv(s1,α,s′1)=P2Adv(s2,α,s′2)且(s′1,s′2)∈RAct。
条件(1)要求Mf1中的所有初始状态s1和在Mf2中的初始状态存在s2满足关系(s1,s2)∈RAct,同理Mf2中的所有初始状态s2和在Mf1中的初始状态s1存在满足关系(s1,s2)∈RAct。
条件(2)要求在Mf1中状态s1通过动作α转移到状态s′1可能性和在Mf2中状态s2通过动作α转移到状态s′2的可能性相等。若存在(Mf1,Mf2)互模拟RAct,称Mf1和Mf2是基于动作的互模拟等价,记作Mf1∼ActMf2。
定义5.2.状态模糊互模拟:设Mfi=(Si,Acti,Pi,Ii,AP,Li)是定义在原子命题集合AP上的模糊决策过程,其中i=1,2。(Mf1,Mf2)是基于状态的互模拟等价满足以下条件的二元关系RState⊆S1×S2:
(1)∀s1∈I1,∃s2∈I2,(s1,s2)∈RState且有∀s2∈I2,∃s1∈I1,(s1,s2)∈RState。
(2)L1(s1)=L2(s2),若s′1∈Post(s1)存在s′2∈Post(s2)使得(s′1,s′2)∈RState,s′2∈Post(s2)存在s′1∈Post(s1)使得(s′1,s′2)∈RState。
软件工程论文参考
第六章总结与展望
6.1研究总结
本文以模糊决策过程为系统模型,定义了模糊分支时态逻辑并且设计其模型检测算法。将互模拟与模糊集合理论相结合,探讨模糊系统的状态空间约简问题,在此基础上讨论模糊分支时态逻与模糊计算树逻辑的等价性。对于不同互模拟之间的关系进行研究,设计相互转换的算法。研究成果主要包括:
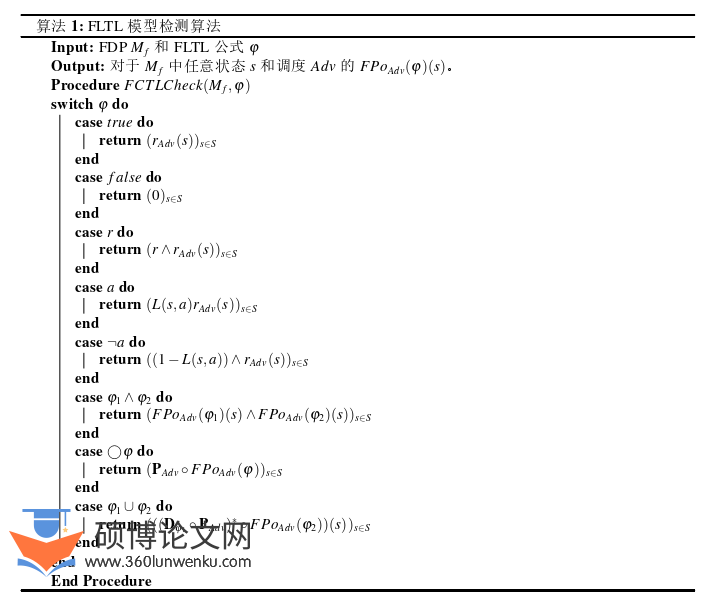
(1)模糊分支时态逻模型检测方法。
本章提出了模糊分支时态逻辑模型检测算法。首先,对分支时态逻辑进行扩展,与模糊测度进行结合,提出模糊分支时态逻,用于描述系统的行为和属性。然后,给出模糊分支时态逻辑的模型检测算法将检测问题转化为矩阵运算,具有计算方式简洁、复杂度较低的优点。最后,使用一个医疗专家系统的实例说明了该算法的有效性。
(2)模糊最大可能性互模拟。
本章研究了模糊最大可能性互模拟的问题。首先,利用模糊决策过程中的调度概念,给出模糊最大互模拟等价的定义。其次,给出最大可能性互模拟商的定义使用一个打印机系统实例对此进行了说明。然后,对路径长度相等和满足互模拟等价关系的状态出发的路径可能性相等定理进行证明。最后,对最大互模拟等价状态下FCTL和FCTL*公式的等价性进行证明。
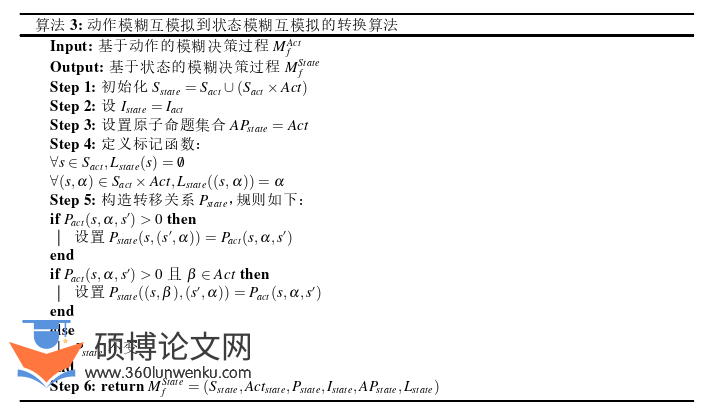
(3)动作模糊互模拟与状态模糊互模拟。
本章研究了动作模糊互模拟与状态模糊互模拟两者之间的转换算法。首先,根据经典动作互模拟与经典状态互模拟的定义,与模糊理论相结合,对两种互模拟进行了扩展。其次,给出基于动作集合的进程中的握手机制,并给出握手机制的同余原理。利用握手及握手同余的性质讨论两种互模拟的等价。并给出相应的转换的规则后设计相应的算法。然后,使用一个智能工厂的实例对两种转换算法进行详尽说明。最后,探讨了模糊互模拟,模糊模拟等价,模糊模拟序三种模拟的关系。
参考文献(略)