本文是一篇软件工程论文,本文使用PESMOD数据集对整个算法进行验证,对比原YOLOv5l+DeepSORT算法,CGA-YOLO与包含多角度策略的DeepSORT算法结合能获得超过9.7%的IDF1值,并且减少了原算法中42.6%的小目标ID Switch问题。以上的实验数据能足够证明本文提出的基于小目标检测跟踪算法的有效性。
第一章 绪论
1.1 研究背景与意义
自2012年AlexNet[1]的横空出世,深度学习已经展示出在计算机视觉领域的巨大潜力,深度学习[2]相关技术已经逐渐渗透到人们的生活当中,相继出现的各种自动驾驶、医疗影像和智慧检测平台不断地鼓舞学者们探索人工智能的能力,计算机视觉作为人工智能的一大领域也取得了飞速发展。
小目标检测跟踪是指在计算机视觉中检测、识别并标记视频不同帧中同一小尺寸目标的技术。小目标检测在军事、公安以及消防等许多领域都有广泛的应用,如无人机城市车流密度检测[3]、汽车自动驾驶[4]、军事航空或沿海安防监控等,图1-1所示为各种场景拍摄视角中的小目标。在无人机视觉领域中,通过小目标检测可以识别目标的位置和大小,从而实现更精确的目标跟踪和定位;在自动驾驶领域,小目标检测算法可以帮助车辆识别周围的行人和其他车辆,从而提高驾驶安全性;在遥感卫星视觉领域,小目标检测跟踪算法可以捕捉到有异常行为的飞机、轮船等目标,从而更加精确和及时地完成交通异常监测、军事防御等安全任务。

软件工程论文怎么写
...........................
1.2 国内外研究现状
常见的目标检测跟踪算法[6]通常从图像中提取感兴趣的目标后使用全局唯一ID的方式标识不同帧间的目标是否为同一个。根据从图像中提取目标特征的方法,可以将目标检测算法分为传统目标检测方法和基于深度学习的目标检测算法;根据不同图像之间同一目标的特征信息相似度衡量方式,也可以将目标跟踪方法分为传统目标跟踪算法和基于深度学习的目标跟踪算法。
1.2.1 基于传统方法的目标检测算法
在流程上,基于传统的目标检测方法大概可以分为以下几个步骤:1)采用滑动窗口从图像中获取候选框,或者采用选择性搜索算法[7](Selective Search,SS)对整个图像进行分析处理获取候选框;2)对获取到的候选框提取特征3)通过一个或者多个特征信息,判断该候选框内是否有目标,并记录下目标的定位信息;4)使用SVM[8] (Support Vector Machine,SVM)等分类器对记录的目标进行分类;5)类别区分完毕后,采用非极大值抑制算法[9](non-maximum suppression,NMS)对检测框进行提优,最后得到较优的目标位置和类别信息。
在方法上,传统的目标检测算法主要有阈值法、模板匹配方法,以及基于特征的方法。1)阈值法的算法核心点在于假设了目标像素具有与背景像素不同的统计分布,其主要步骤包括设置阈值,然后基于每个像素的强度值是高于还是低于阈值将其分类为目标或背景。除此之外,根据不同的场景以及目标的复杂性还出现了多种阈值技术,包括全局阈值、局部阈值和自适应阈值等。2)模板匹配方法主要将预定义的模板图像与输入图像进行比较,使用各种度量来执行模板匹配,包括平方差和、归一化互相关和相关系数,然后识别与模板匹配的区域。3)基于特征的方法包括从输入图像中提取特征,例如边缘或角落,然后使用这些特征来识别与目标相对应的区域。常见的特征提取技术包括Sobel算子[10]、Canny边缘检测器[11]和Harris角检测器[12]。研究人员还探索了机器学习技术在目标检测中的应用。这些技术涉及在一组标记的训练数据上训练分类器,例如SVM或神经网络,然后使用分类器将新数据分类为目标或背景。
...............................
第二章 基础理论与相关技术
2.1 卷积神经网络理论及其应用
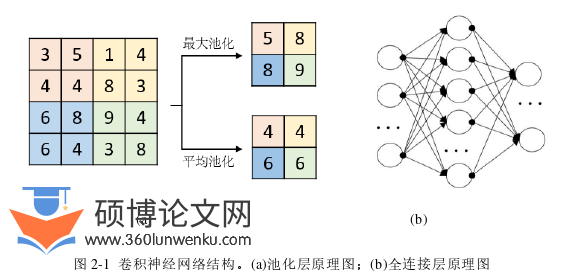
在计算机视觉领域,通常使用卷积神经网络对图像信息进行特征提取处理,从整体结构来看,卷积神经网络可以分为输入层、中间层和输出层,输入层和输出层分别代表网络的数据来源和数据输出,中间层往往通过复杂的卷积等计算操作对数据进行特征提取;从结构功能来看,卷积神经网络又可以分为卷积层、池化层和全连接层。
其中,卷积层使用多种卷积核对上层输出的特征图进行遍历,以卷积核的尺寸作为感受野提取出图像的特征;池化层通常分为最大池化和平均池化,将池化区域的信息进行聚合并减小特征图分辨率,池化层的原理如图2-1(a)所示;全连接层则是以二分图的方式将输入节点与输出节点做全连接线性映射,由于它通常包含大量参数,因此全连接层一般仅作为输出层使用,全连接层的原理如图2-1(b)所示。
软件工程论文怎么写
............................
2.2 基于深度学习的目标检测算法
在目标检测领域,根据算法流程分为两阶段检测算法和单阶段检测算法,因此针对本论文要研究的检测模块来看,有必要对经典的目标检测算法进行详细的学习,下面将从不同目标检测算法的网络结构和设计思路进行分析。
2.2.1 两阶段目标检测算法
两阶段目标检测算法需要先对图像进行处理,使用候选框选择算法获取图像中目标可能存在的区域,然后再对候选区域的图像进行特征提取和分析,进行定位、分类和回归。两阶段目标检测算法通常由主干特征提取网络、候选区域生成算法和检测头三大部分组成。下面分别介绍R-CNN系列中的几个部分。
(1)R-CNN
R-CNN的算法结构如图2-2所示,其核心流程为:1)算法通过Selective Search[7]算法从候选框中提取出候选区域;2)将所有区域缩放为224×224的尺寸后放入CNN中提取特征。3)将2000个候选区域提取的特征组合为2000×4096的矩阵后,与20个SVM组成的权值矩阵进行矩阵计算,由于每一个SVM都对应为一个类别的二分类器,因此可以得到一个2000×20的矩阵,矩阵元素则表示对应区域的类别判定;4)通过NMS算法对检测框集合进行提优,剔除重叠度较高的建议框。5)最后通过对检测框进行回归微调得到修正后的检测框。
从算法流程图中可以看到,R-CNN不仅采用了SS算法获取大量候选框,并且只在最深层特征图上进行全连接分类操作,算法效率比较低,后续的改进策略也主要从候选区域获取算法、特征提取网络以及全连接层进行优化。
(2)Fast R-CNN
R-CNN不仅需要对每一个类别训练一个分类器,还需要使用一个regressor对得到的检测框进行回归,除此之外,候选区域的获取也需要单独使用Selective Search算法,步骤相当繁琐。针对这些问题,Fast R-CNN进行了以下改进:1)直接对整个图像进行特征提取,在获取候选框对应的区域特征时,使用坐标投射的方式直接从特征图中截取,由此可以减少大部分冗余计算;2)针对全连接层的固定节点数,使用ROI Pooling层进行特征图的放缩;3)用Softmax函数进行分类,并将回归器放入网络中一起训练。
............................
第三章 针对小目标的特征提取和融合网络研究 ························ 21
3.1 卷积神经主干网络分析 ······················· 21
3.2 多头注意力主干网络分析 ························ 23
3.3 特征融合网络分析 ····························· 25
第四章 基于多角度信息匹配的小目标跟踪算法研究 ······················· 41
4.1 多目标运动跟踪轨迹预测算法和目标匹配算法 ······················· 41
4.1.1 带权二分图构建代价矩阵 ························ 41
4.1.2 匈牙利算法 ······················· 42
第五章 智能交通密度检测与跟踪系统 ······················· 56
5.1 应用背景 ····························· 56
5.2 需求分析 ·························· 56
第五章 智能交通密度检测与跟踪系统
5.1 应用背景
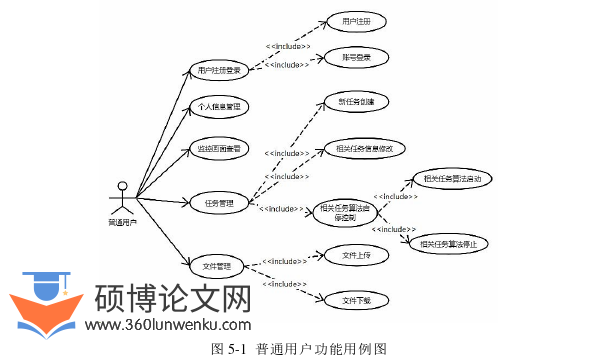
本文中,第三、四章中分别提出了针对于小目标的检测和跟踪算法,两个算法结合后已经有了较好的检测跟踪效果,为了将研究应用到实践中,本章设计并实现了一个监测系统,能够实现小目标的检测与跟踪。从系统开发层面看,需要对该监测系统进行需求分析、系统设计、详细设计、模块实现和集成、单元测试以及系统测试等步骤,系统实现后对各个模块进行详细的说明并对最后的结果进行展示。
在机场、沿海码头等区域通常有非常重要的交通监测需求,尤其在一些敏感海关和航空领域,通常都需要非常及时、准确地检测和跟踪场景中的每一个运动目标,以便于安全人员及时管理交通流量情况以及监测一些异常情况。然而,以往的做法受限于通用目标检测算法对于小目标的检测能力,在无法准确捕捉场景中小目标的情况下,就对人工工作效率以及进行场景拍摄的摄像机有较高要求。本文提出的小目标检测跟踪算法能够很好地解决上述问题,因此以本文提出的算法为基础,设计并实现智能交通密度检测与跟踪系统。
软件工程论文参考
...........................
第六章 全文总结与展望
6.1 全文总结
本文的主要研究内容是基于深度学习的小目标检测跟踪算法及其应用。首先,通过研究背景和国内外现状说明本课题的研究意义;然后,介绍了本课题需要了解的深度学习基础理论以及常见的目标检测跟踪算法,针对常见目标检测跟踪算法在小目标任务上出现的问题与难点展开研究,分别从检测和跟踪两个模块对其进行分析。在检测模块中,分别从主干特征提取网络、特征融合网络以及检测头三个方面针对算法进行改进;在目标跟踪模块中,主要从外观、定位和运动三个角度对跟踪匹配算法提出优化策略。主要研究内容包含以下三个方面:
(1)基于上下文信息的目标检测主干特征提取网络。在通用目标检测算法中,主干提取网络往往需要进行一系列下采样得到原图像在不同深度下不同尺寸的特征图,由于小目标像素面积占比较小,在特征提取过程中可能导致特征细节严重丢失,因此提出一种能将目标上下文融入特征图的主干特征提取网络,使用Transformer结构将上下文信息与特征信息融合,从而增强小目标在特征图中的特征表达能力。另外,为了强化算法对于小型目标的检测能力,本文还使用浅化特征头的策略增加特征图分辨率,在多尺度特征图融合方案下进一步加强算法对于小目标的捕捉能力。
(2)基于全局注意力机制的目标检测特征融合网络。在对常规特征融合网络进行研究分析后,发现了包含上下文信息特征图在融合网络中存在的信息传播流失问题,针对此问题,本文提出了一种基于全局注意力机制的特征融合网络,采用由上和由下的多条融合路径增加上下文信息的传播,并采用全局注意力模块,使得最终的特征图中能有效融合特征图中的语义信息以及上层的上下文信息。结合主干特征提取网络、特征融合网络以及检测头三个方面的改进能够增强模型对小目标的检测能力。
参考文献(略)