本文是一篇机械论文,本文着眼于隐形矫治器的切割工序,设计了一款基于机器人加工的自动切割路径生成软件,以代替原本的人工切割工序,提高切割的效率以及精度。
1绪论
1.1课题研究背景
近年来,随着社会的不断发展和人民生活水平的逐渐提高,人际交往也变得越来越频繁和重要,这也使得自身外表越来越被重视,而洁白且整齐的牙齿会极大地提高人们的外在形象。
错颌畸形是一种常见的口腔疾病,错颌畸形主要表现为,上下颌弓间颌关系异常,牙齿排列不齐,颌骨形态、位置和大小异常等[1]。错颌畸形不单单是牙齿的错位及排列不整齐,而是由包括面部、颅骨、颌骨和牙齿间关系不协调引起的各种畸形。2000年,中华口腔医学会口腔正畸专业委员会对全国七个地区包含乳牙、替牙和恒牙的共25392名儿童与青少年的调查,结果显示我国儿童与青少年的错颌畸形患病率为67.82%,并有逐年递增的趋势[2]。
世界卫生组织(WHO)将错颌畸形称作“牙面异常(handicapping dentofacialanomaly)”。错颌畸形不仅影响牙颌面发育、口腔功能和口腔健康,还会影响颜面美观对患者的心理健康造成很大的困扰,除此之外,因错颌畸形导致的咀嚼功能降低也会引起肠胃疾病[1]。因此牙齿正畸不仅仅是排齐牙齿和矫正牙颌颅面不调引起的畸形,更重要的是通过矫正来恢复口腔系统的正常功能,正畸治疗的目标是美观、稳定和协调[3]。
大量研究表明,致使牙齿畸形的病因复杂,错颌畸形是遗传因素[4]、在母体中的先天环境因素、成长过程中的后天环境因素[5]共同作用的结果,因此正畸治疗是借助矫治器产生作用于颌骨、牙齿或颞下颌关节的力,使得颌骨和牙齿产生力来达到矫治效果,并且在乳牙期或混合牙列早期进行治疗可以有效避免后续复杂且昂贵的矫治过程[6]。
机械论文怎么写
.....................
1.2国内外研究现状
1.2.1干涉检测研究现状
在CAD/CAM等领域,模型与刀具的干涉检测是重要的一个步骤,现今三维模型往往使用三角面片进行表达,随着制造业的发展,用于加工的模型和刀具越来越复杂,模型的三角面片数量也越来越多,因此,刀具与模型干涉检测算法的稳定性与效率影响着工件的加工质量与效率。
工件与刀具的干涉可以分为局部干涉和全局干涉两种,如图1.5(a),局部干涉是刀具与工件表面发生的不正常切削,在干涉位置会发生过切现象,导致工件报废和刀具的损坏;如图1.5(b),全局干涉通常是指刀杆与工件、夹具等发生碰撞的现象,全局干涉可能会毁坏刀具甚至对主轴造成严重损坏。在本文的正畸矫治器切割中,主要的干涉情况是全局干涉。
判断全局干涉检测的方法主要分为三种:空间分解法、包围盒法和模型离散法。空间分解法是是将整个三维空间分解为许多正方块作为小单元格,碰撞检测只对相同或相邻单元格所对应的几何对象进行相交检测,有八叉树、BSP等方法[20];层次包围盒法用包围盒替代几何对象进行相交检测[21],包围盒不相交,对应的几何对象一定不相交,常见的包围盒有球包围盒法、AABB轴向包围盒法、根据物体本身的几何形状来决定盒子的大小和方向的OBB包围盒法;还有将模型离散成三角面片进行求交或者离散成点云投影求交的模型离散法[22-23]。
.........................
2正畸矫治器初始切割路径生成
2.1引言
牙龈是附着在牙颈和牙槽突部分的黏膜组织,有光泽,呈粉红色,质坚韧,龈缘线就是牙龈的边缘。如图2.1所示,其中虚线为龈缘线。
隐形矫治器的切割线有三种[40],如图2.2所示,用圆弧连接相邻牙齿的龈缘线、连接龈缘线顶点和在龈缘线顶上2mm直切。在力学角度方面,采用圆弧连接龈缘线切割的矫治器对牙的矫治力较差,并且因为对切割边缘的打磨,也会使得边缘处的材料硬度减小;在B和C类切割线中,随着矫治器边缘的延伸,矫治力也会变得更好[41]。虽然采用A类切割线的矫治器力学性能并不优秀,但综合考虑美观和佩戴舒适性,常见的矫治器仍以A类切割为主,并且会添加附件以改善力学性能。因此,本文的矫治器切割路径采用圆弧连接龈缘线的方式进行规划。
...................
2.2模型导入与预处理
2.2.1拓扑模型建立
由于输入的模型都是STL模型,散乱的三角网格不利于模型的处理和计算,需要根据点、线和三角面片之间的关系对其进行拓扑重建。拓扑重建的目标就是从任意的点、线段或者三角面片出发,都可以找到与其相连的其他点、线段或者三角面片。
STL模型文件中保存的数据是三角面片三个顶点坐标和法向量。通过读取模型可以将点、线段和三角面片分别保存到相应的列表Points、Edges和Triangles中并建立临近关系,但其中顶点和线段是数据是冗余的,每个顶点被重复保存了六次,每条线段重复了两次,因此对STL模型进行拓扑重建首先就是要消除重复的数据。
哈希表(Hash table),是一种根据键值对(Key-Value)进行查找和访问的数据结构。哈希表查找速度非常快,其时间复杂度为O(1)。C++中哈希表封装于标准库函数unordered_map中。对于顶点坐标,将x、y和z三个坐标保留3位小数并扩大1000倍,以此将坐标数据结构转换成字符串类型”xyz”。以”xyz”为键,拓扑顶点TPoint为值构建哈希表;对于线段,以线段两顶点的索引编号为键,拓扑线段TEdge为值构建哈希表。STL模型拓扑重建步骤如下:
步骤一:初始化拓扑顶点(TPoints)、拓扑线段(TEdges)、拓扑三角面片(TTriangles)和顶点编号n=0;
步骤二:依次读入三角面片顶点坐标A,B,C和法向量信息N;
步骤三:依次查找拓扑顶点哈希表中是否存在A、B和C,若不存在,则新建对应的拓扑顶点TA、TB或TC并对其进行顶点编号标记,然后将拓扑顶点加入拓扑顶点列表TPoints中并自增顶点编号n,若存在读取对应拓扑顶点TA、TB或TC;
步骤四:依次查找拓扑线段中是否存在AB、AC和BC,则新建对应的拓扑线段点TAB、TAC或TBC,然后将拓扑线段加入拓扑线段列表TEdges中,若存在读取对应拓扑线段TAB、TAC或TB;
步骤五:使用拓扑顶点、拓扑线段和法向量构建拓扑三角面片TTriangle并建立之间的联系,将TTriangle加入拓扑三角面片列表TTriangles中;
..................................
3基于切片的刀具姿角可行域计算.......................37
3.1引言...................................37
3.2模型偏置计算.................................37
3.3模型切片计算..........................39
4正畸矫治器无干涉切割路径生成与姿角光顺..........................59
4.1引言....................................59
4.2刀位点移动..................................59
4.3有向图的最短路径.............................62
5正畸矫治器切割路径规划软件开发及加工实验........................67
5.1引言..................................67
5.2正畸矫治器切割路径规划软件开发............................67
5正畸矫治器切割路径规划软件开发及加工实验
5.2正畸矫治器切割路径规划软件开发
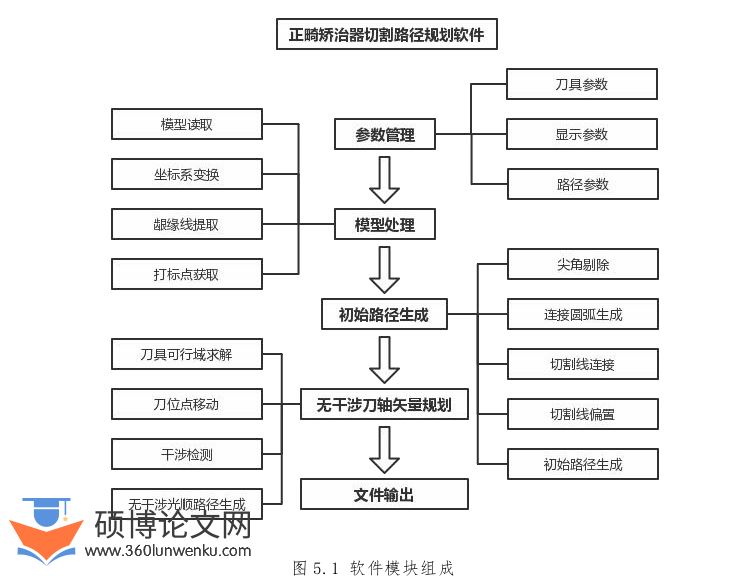
5.2.1软件开发路径
本文使用Visual Studio2019作为开发平台,采用C#和C++混合编程进行软件开发。其中C#作为前端,使用基于.NET Framework 4.0的WinForm作为开发框架,主要进行界面设计、用户输入输出和一些交互操作,C++作为后端,主要进行算法设计包括文件的读取、初始刀具路径的生成、干涉检测、可行域求解、无干涉刀具路径的规划、路径文件的输出等。
除了在上文中使用的测地线库geodesic_matlab和二维计算几何库Clipper,软件的三维几何运算内核主要使用了OpenCasCade(OCC)库,OCC是由法国公司Matra Datavision发布的一套包括基础类、模型数据、建模算法、可视化、数据交换、程序框架等多个模块的一个面向对象C++库,OCC的显示是利用OpenGL实现的。其主要特点如下:
(1)相比于ACIS、Parasolid等多种几何库,OCC是一个完全开源的几何库,具有免费和可扩展性好的优点,用户可以在官网上免费下载(https://www.opencascade.com/)和使用。获得源代码后,只需利用C++编译器将其编译成动态链接库或者静态链接库,便可根据相应的头文件和链接库进行程序的开发。软件发布时,只需将链接库文件放到合适的位置即可运行。
(2)OCC使用C++语言编写而成,并且提供了多种语言(C++、C#、Python等)的程序编程接口(API),用户可以使用多种语言调用OCC进行程序开发。
(3)OCC采用边界表示法进行建模,主要功能有三维几何数据结构定义及基础运算、基本几何体的建模、模型的布尔运算、空间变换、几何体分析等。
机械论文参考
...........................
6总结与展望
6.1论文总结
由于我国居民的口腔消费观念逐渐改善,牙齿正畸的市场需求迅速扩大,其中隐形矫治器因其美观、易清洁等优势成为牙齿矫治的首选器材,占据巨大的市场份额。但是现今矫治器的切割大多采用人工切割或者在软件上手动画线去规划路径,生产效率低,难以满足自动化要求。本文着眼于隐形矫治器的切割工序,设计了一款基于机器人加工的自动切割路径生成软件,以代替原本的人工切割工序,提高切割的效率以及精度。本文的主要工作及创新点如下:
(1)提出了一种根据模型获得初始加工路径的算法。
根据输入的牙龈、牙齿、附件和填蜡模型进行工件坐标系变换并建立拓扑结构。根据牙龈模型的拓扑关系提取出龈缘线,针对联通的龈缘线提出了膨胀收缩的方法进行拆分。根据输入的连接圆弧半径参数,对龈缘线在模型表面上偏置、求交和细分得到球心三角面片进而得到连接圆弧,对于连接圆弧过近或者无法生成连接圆弧的龈缘线使用测地线进行连接。将连接圆弧与龈缘线进行合并得到切割线,对切割线在模型表面上根据刀具补偿距离进行偏置得到刀具路径,根据经验对切割路径进行分区结合模型表面法向量得到初始的刀轴矢量。
(2)提出了一种基于切片的干涉检测算法与刀具姿角可行域求解算法。
在本文中,刀具与模型需要进行大量的干涉检测,为了提高干涉检测效率,提出了一种基于切片的干涉检测算法。在满足精度要求下,对模型和刀具进行切片,通过判断每层切片的相交情况来得出刀具与模型的干涉结果。
为了对干涉刀位点进行调整,需要求出刀具的可行域。本文将模型采用切片表示,求出刀具与切片的干涉区域并在二维C空间网格上,采用剔除不可行域的方法来求取可行域,针对切片的边界问题,通过判断夹角大小和点干涉的修正取得了良好的效果。
参考文献(略)