本文是一篇机械论文,笔者利用AMEsim软件搭建了液压系统仿真模型,模拟不同工况,对液压系统的动态特性进行了研究。该液压系统具有良好的抗负载波动能力;
第1章 绪论
1.1选题背景及意义
本课题来源于中国地质科学院勘探技术研究所地勘纵向项目“ ‘地壳一号’钻机大修(八)”((2020)地科字(26)号)和吉林省科技发展计划项目“具有自定心功能的钻具旋扣装备研制”(20220201037GX)。
科技文明的不断进步,使人类对地质研究、资源探索等方面的需求愈发强烈。地球深部勘探有助于研究地质自然灾害的发生规律,是人类了解地球深部结构构成、地球深部物质组成、矿物资源分布和演化规律的重要手段[1]。此外,随着能源危机的日益加剧,一方面,科学家着力于提高能源的利用率,另一方面积极探索地球上的可用石油资源。这些活动的开展,都需要借助钻探工程。
钻探工程是地学基础研究的重要实践手段,通过钻取、采集地下岩石,从而建立地球物理、地球化学信息的观测通道[2],对研究地壳板块运动、海陆气候变化、火山喷发、地震的产生机理有着积极的作用。
随着浅层资源的逐渐枯竭,为了探索可用资源,研究地质灾害规律,世界各国都积极进行地球深部勘探研究。例如美国COCORP计划(Th e o Cnso ri ut m f o or ntiCn e anl tRef elctionP r o ifn i g)l、美国地球透镜计划(EarthScope)、中国大陆科学钻探工程(Chinese Continental Scientific Drilling)、中国深部探测技术与实验研究专项(SinoProbe)等[3][4]。我国为了研究古代气候、勘探化石能源、进行地学基础研究和发展地球深部探测技术,也开展了松辽盆地大陆深部科学钻探工程项目,目前已取得一系列研究成果[5][6]。
........................
1.2 铁钻工国内外研究现状
1.2.1 概述
铁钻工设备被研制并投入生产使用前,钻探工程中广泛使用手动大钳进行连接拆卸钻具。图1.1为手动大钳的操作情景。

机械论文怎么写
在执行深度钻探作业,如地质勘探工程,资源探索工程等钻探深度需求较大的工程时,由于钻具长度的限制,需要频繁的停止钻探作业,起钻连接钻具。手动大钳需要多名工人协同操作,不仅连接拆卸操作时间长,工作效率较低,对操作人员的体力消耗也十分巨大[9]。钻探工程现场环境恶劣,复杂的施工环境也导致人工操作的安全性较差。后来为了提高工程效率,节省人力,以手动大钳为基础的液压动力大钳应运而生。图1.2为一种较为典型的液压动力大钳结构,相比于手动大钳,液压动力大钳采用液压驱动,气动控制。虽然仍需要多名操作人员协同现场操作,但大大降低了操作人员体力的消耗,连接拆卸钻具的操作时间也得到缩短,操作过程相比手动大钳更加迅速,工作效率和操作便利性得到了显著的提高[10]。
.............................
第2章 铁钻工旋扣机构自适应结构研究
2.2 铁钻工总体结构及工作过程
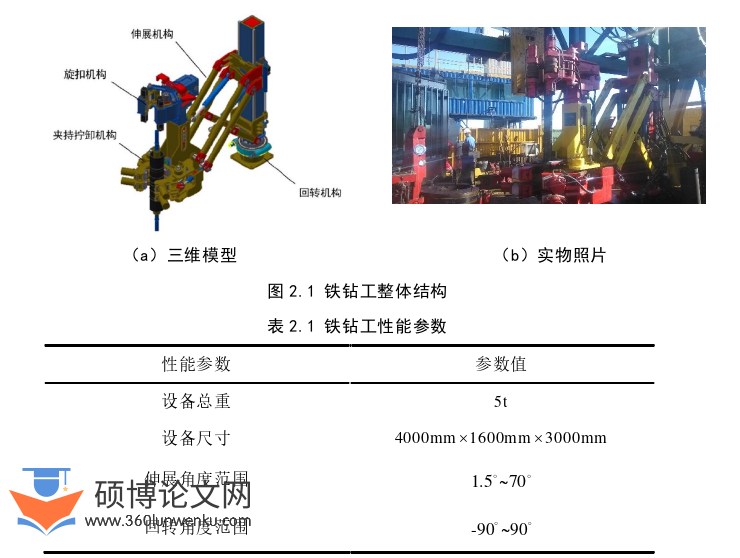
2.2.1 总体结构及性能参数
铁钻工的整体结构三维模型如图2.1(a)所示,图2.1(b)为铁钻工实物照片。其主要性能参数如表2.1所示。
机械论文怎么写
.......................
2.3 铁钻工旋扣机构自适应结构研究
2.3.1 旋扣机构的性能要求
旋扣机构负责钻具连接拆卸的旋扣过程,是铁钻工主要的工作机构之一,其性能的好坏很大程度的影响了铁钻工整机的工作效果与工作效率。其工作原理是通过旋扣滚轮与钻具间的摩擦力进行旋扣作业。因此对旋扣机构的性能有以下要求:
(1)提供足够的抱紧力,以保证滚轮与钻具间的压力,从而保证旋扣的正常进行;
(2)钻具轴心相对滚轮夹持中心存在位置偏移时,依旧能保证滚轮与钻具间接触良好;
(3)抱紧钻具后,旋扣机构在旋扣过程中保持钳体位置稳定。
因此,旋扣机构的夹紧液压缸输出的最大工作压力需要根据旋扣扭矩的数值进行计算。同时,在结构上,要保证旋扣机构本身具有自适应钻具偏心的能力,也要兼顾抱紧钻具时的稳定性能。
.................
第3章 铁钻工液压系统方案研究 ...................... 21
3.1 引言 ................................... 21
3.2 铁钻工液压控制系统方案研究 ............................... 21
第4章 液压系统主要元件参数的确定 ......................... 36
4.1 引言 ........................................ 36
4.2 液压缸尺寸计算依据 ............................... 36
第5章 基于AMEsim的铁钻工液压系统仿真分析 ........................... 54
5.1 引言 ..................................... 54
5.2 LMS Imagine.Lab AMEsim软件概述 .................... 54
第5章 基于AMEsim的铁钻工液压系统仿真分析
5.2 LMS Imagine.Lab AMEsim软件概述
AMEsim(Advanced Modeling Environment for Simulation of Engineering Systems)软件是法国 Imagine 公司开发的工程系统仿真建模软件,它可以为液体、气体、机械、控制、电磁等工程系统提供较为完善的综合仿真环境,用户可以使用基本元素法按照物理模型搭建系统,而不用推导复杂的数学模型[38]。AMEsim能对多学科跨专业复杂系统进行建模[39]。使用AMEsim软件可以快速搭建系统的仿真模型,达到分析和优化设计的目的,从而降低开发成本和缩短开发周期[40]。 AMEsim相较于其他仿真软件,有以下几点优势:
(1)AMEsim软件采用变步长、变阶数、变类型和鲁棒性强的智能求解器[41][42],它可以根据用户建立的仿真模型,从多种求解算法中选择最合适的积分算法,并在仿真的不同时刻根据系统特点动态的切换积分算法 [43],以达到缩短仿真时间,提高仿真精度的目的。其内嵌式数学不连续性处理工具可以有效地解决数值仿真的“间断点”问题[44][45]。
(2)AMEsim软件采用基本要素理念,确保用户使用尽可能少的单元构建尽可能多的系统[46]。这种理念的优势在于工程师只需要掌握较少的系统建模单元就可以建模,从而通过减少学习成本和避免数学建模来提高工作效率[47][48]。
(3)AMEsim 软件保留了数学方程级、方块图级、基本元素级和元件级四个层次的建模方式[49],工程师可以选择适合自己的方式对工程系统进行建模。
机械论文参考
..........................
第6章 总结与展望
6.1 全文总结
本文具体的工作内容和相关结论主要为以下几个方面:
(1) 基于铁钻工国内外研究现状、现有铁钻工产品发展情况,介绍了铁钻工设备的工作原理,分析了铁钻工旋扣机构与铁钻工液压控制系统的性能要求,确定了本文的研究内容与方向。
(2) 结合铁钻工旋扣机构的工作要求,对铁钻工进行了结构设计,并针对其自适应钻具偏心性能和对钻具抱紧稳定性进行分析研究。分析结果表明,该形式的旋扣机构具有良好的钻具偏心自适应能力,同时抱紧稳定性良好,满足旋扣机构的性能要求。
(3) 根据铁钻工设备的性能参数与工作实际,以保证功能性为前提,提高液压系统同步性为目标,对铁钻工的液压系统进行了研究,并对液压系统进行了数学建模。
(4) 结合铁钻工的性能参数对相关液压元件进行了参数计算。
(5)利用AMEsim软件搭建了液压系统仿真模型,模拟不同工况,对液压系统的动态特性进行了研究。该液压系统具有良好的抗负载波动能力;偏载时同步性良好;压力损失小,节能效果好。对机械结构较复杂的旋扣机构液压系统,采取了AMEsim-Adams联合仿真的方式,对其可行性进行了进一步仿真分析研究,结果显示旋扣机构液压系统可以满足旋扣机构的工作要求。
参考文献(略)