本文是一篇机械论文,笔者完成了可编程复合翼飞行器硬件系统的设计,包括主控制器选型、传感器选型、执行机构、无线模块的选型。在系统软件设计上,主要完成了软件部分的总体设计、PWM 的产生和捕获、传感器的数据采集、无线通信的数据收发和接收等的流程设计。
1 绪论
1.1 课题研究的背景和意义
1.1.1 课题研究背景
当今社会,无人驾驶是研究的热门话题,其中无人驾驶飞行器,是其中研究的热点之一,无人驾驶飞行器也叫无人机,可以通过遥控控制或者自带的主控芯片控制,实现飞行目标[1]。
人们对飞行的渴望从古至今一直存在,但由于时代的约束,无人驾驶飞行器在 1920年左右才开始出现。人们研制无人机最初的目的是想要通过无人机代替人类去完成一些危险的军事任务。例如侦查敌情、军事打击等,通过无人机执行任务,来减少人员的伤亡,增加效费比。无人机在军事领域应用成熟化后,在上个世纪八十年代推广到了民用领域。由于无人机可以解放劳动力,从事高危工作,并且比人类有更好的耐久性。所以很快在民用领域也掀起了研究的热潮[2]。
在民用无人机的研究上,我们国家很早就开始了。在 1980 左右,西北工业大学首先开始把军用无人机转变为民用无人机,把军用的 D-4 无人机用在地质探测和地形测绘等多个民用领域[3];2003 年北京大学和贵州航空工业集团联合研制了一款高端民用无人机。该无人机可以用于自然灾害幸存人员搜救、极端异常天气预测、飞行事故航空管制等[4];如今无人机在气象预测、自然防灾、边防巡逻、火灾预警、人员搜救、小区巡视等等各个领域下的应用都得到了普及[5]。
由于无人机发展时间并不长,因此相关系列理论研究不是很成熟,目前市面上的主流飞行器都存在自身缺点。研究资料表明,现在主流民用四旋翼无人机的飞行时间基本在 45 分钟左右,难以满足森林防火巡检、远距离电力配送巡检、大范围地形测绘等需要无人机长时间作业的应用需求[6]。另一类主流飞行器固定翼无人机可以在稳定飞行后利用空气升力进行飞行,减少能源消耗,延长飞行时长,解决了旋翼飞行器续航能力不足的缺点。但固定翼无人机也有自己的缺点。在实际生活中,无人机执行飞行任务时,起飞以及降落的场地多种多样,由于固定翼起降时需要较长的滑行跑道,大多数起降的实际场地都不符合,限制了固定翼的实际应用[7]。而在军事领域中,派遣无人机执行任务时,往往需要无人机有较高的隐蔽性和机动性,一般的固定翼和多旋翼都难以实现该要求[8]。
.....................
1.2 国内外研究现状
1.2.1 国外研究现状
美国的 Arcturus UAV 的公司和 Latitude Engineering 公司通过合作完成了两款既可以实现悬停功能又具备长航时和大载荷的无人机,这两款无人机分别为 Jump-15 和Jump-20,实物如图 1-3 所示。其中 Jump-15 可以携带 2.5 千克左右的重物,飞行时长可以达到 8 小时左右。Jump-20 相比于 Jump-15,机身采用了更轻的的是碳纤维材料,因此 Jump-20 可以携带更大的重物,最大载荷可达 30 千克,同时 Jump-20 的续航能力相比较 Jump-15 也更长。由于 Jump 系列无人机是将旋翼和固定翼结合起来的复合翼飞行器,所以既可以实现在空中的稳定悬停,又有着固定翼一样的长航时特性[15]。

机械论文怎么写
德国 Aerolution 公司研发的 Son GBIRD 500 系列的复合翼飞行器,飞行器机械结构简单,易于装配,飞行覆盖面积大,续航时间大约在 1 小时左右,具有稳定的悬停能力,操作简单,仅仅需要一个操作手就可对该飞行器进行控制。该飞行器还可以适应各种恶劣的环境,在高温、高压、低温、雨雾天等天气下都可以正常的工作。但该飞行器载重能力有限,有效载荷仅为 500g,不能携带太多的重物[16]。
......................
2 飞行器飞行状态分析及数学建模
2.1飞行器飞行状态分析
从可变形复合翼的结构和功能特性来看,该飞行器有三个主要的飞行状态:四旋翼状态、固定翼状态以及旋翼固定翼过渡状态[32]。但在一些特殊的情况下,需要通过机翼变形,产生第四种飞行状态,扑翼状态。
在四旋翼状态时,可变形复合翼通过四旋翼进行飞行,机翼部分折叠收拢不提供升力,可变形复合翼飞行器通过四旋翼的升力与重力的二力平衡实现稳定悬停。进行其他飞行动作,如起飞、降落、俯仰、偏航、滚转,则是通过控制板产生不同占空比的 PWM信号进而控制旋翼电机产生不同的转速实现的。可变形复合翼在固定翼状态时,机翼通过变形平铺展开,复合翼通过固定翼方式进行飞行,此时四旋翼螺旋桨的转速为 0 r/min,这个状态下的复合翼,由于是通过固定翼实现的飞行,所以具有固定翼的特点,有很强的续航能力,可以用于执行长航时任务。可变形复合翼的过渡状态指的是,当复合翼通过四旋翼在空中加速到一定速度时,可变形复合翼飞行器的状态需要从四旋翼状态转变为固定翼状态。在一些特殊情况下,例如需要无人机进行一些侦查工作时,需要飞行器有较高的隐蔽性,这时候在复合翼飞行器可以在多旋翼模态下,通过机翼变形展开机翼,再利用舵机控制机翼扑动,复合翼飞行器进入到扑翼状态,可以为复合翼飞行器提供较高的隐蔽性,以此顺利完成侦查任务。
从整个飞行过程来看,可变形复合翼飞行器的飞行阶段可以分为以下 8 个阶段,分别是:垂直起飞阶段,起飞悬停阶段,机翼展开阶段,固定翼飞行阶段,扑翼仿生阶段,机翼收拢阶段,降落悬停阶段,垂直降落阶段。
............................
2.2 坐标系定义及转换关系
2.2.1 坐标系定义
对可变形复合翼飞行器进行运动学分析,得到飞行器的数学模型之前,需要针对飞行器建立一套适合的坐标系。本文基于固定翼坐标系的建立方法,建立了一套可变形复合翼飞行器的坐标系。可变形复合翼飞行器由四旋翼和变形机翼两部分组成,如图 2-2所示。本论文主要研究的是可变形复合翼的垂直起降和悬停,并能够在悬停时完成机翼的折叠和展开。所以除传统飞行器的惯性坐标系和机体坐标系之外,要额外增加一个四旋翼的坐标系,来对悬停进行角速度方程和线速度方程的建立。
惯性坐标系表示为 Oexeyeze。可变形飞行器在空中飞行时,所需要用到的参数例如机体所在的经纬度、飞行器的速度、飞行器的运动轨迹、飞行器的姿态角度等等,这些参数都是针对惯性坐标系定义的。选择坐标系原点 Oe为空间中的任意一点,Oexeye定义为水平面,轴 ze垂直于 Oexeye竖直向上,xe轴在 Oexeye内,ye轴与 xe轴和 ze轴两两垂直,构成右手坐标系。
机体坐标系表示为 Obxbybzb。该坐标系定义在可变形复合翼飞行器的机身上,原点 Ob是复合翼飞行器在飞行过程中的瞬时质心,轴 xb方向为可变形复合翼飞行器的机身轴线,正方向为机头方向;轴 yb为可变形机翼的轴线方向,正方向为垂直于 xb轴方向向右;轴zb与轴 xb和轴 yb两两垂直,且过瞬时质心 Ob。正方形为竖直向上,符合右手法则。机体坐标系相对于惯性坐标系之间的三个角度就是可变形复合翼飞行器的姿态角。
气流坐标系表示为 Owxwywzw。其原点 Ow 也位于可变形复合翼飞行器的瞬时质心处,轴 xw为复合翼飞行器的前进飞行时机体的速度方向,轴 yw位于 Owxwyw平面内,垂直于轴xw,并且符合右手法则,轴 zw垂直于 Owxwyw平面向上,并且通过瞬时质心 Ow,同样满足右手法则。
..............................
3 飞行器的控制器设计 ........................ 23
3.1 引言 ................................. 23
3.2 总体设计 .................................... 23
3.3 数据融合与姿态解算 ................................ 24
4 飞行器软硬件设计与实验测试 .................. 49
4.1 引言 ..................................... 49
4.2 飞行器硬件平台设计 .............................50
5 结论与展望 ...................................... 67
5.1 结论 .................................... 67
5.2 展望 ................................ 67
4 飞行器软硬件设计与实验测试
4.1飞行器硬件平台设计
4.1.1 硬件系统设计
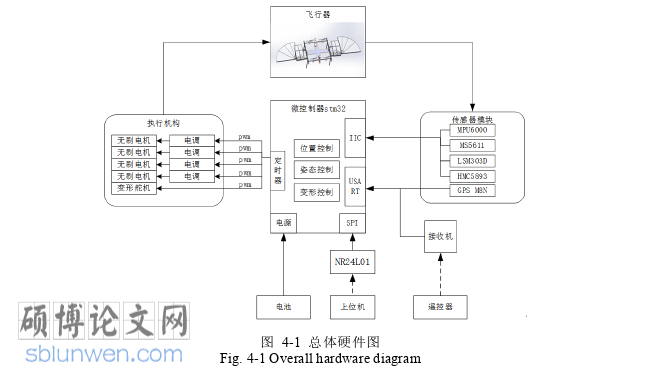
根据实验室设计的可变形复合翼飞行器平台进行了硬件的模块划分。主要包括主控芯片模块、数据采集模块、执行机构模块、无线数据传输模块。主控芯片模块可以对数据采集模块采集的数据进行分析和处理,并给执行机构模块发出控制命令。数据采集模块用于采集飞行器飞行过程中飞行器的姿态和位置信息。执行机构是整个飞行器的动力来源,包括电机、舵机、电调、螺旋桨等。无线数据传输模块是通过遥控器或者地面站向飞行器发送控制命令,实现对可变形复合翼飞行器姿的控制的系统总体设计方案如图 4-1 所示。
机械论文参考
.......................
5 结论与展望
5.1 结论
本文通过对当前的各类飞行器调研分析,制定了研制一款集成了各类主流飞行器优点的可变形复合翼飞行器的研究方向和目标,通过数学推导,建立起了可变形复合翼飞行器运动学的数学模型,并制定了合适的控制策略,完成了软硬件平台的搭建。并通过实际的试飞实验验证控制系统的可行性和稳定性。主要完成的工作如下:
(1)建立可变形复合翼无人机数学模型。通过牛顿第二定律建立的飞行器位移方程,通过转动定律建立飞行器的姿态方程。根据实际情况,对可变形复合翼飞行器的数学模型进行了合理的简化,为软件仿真和算法设计奠定了基础。
(2)根据实验室复合翼飞行器样机的悬停任务,选择了合适的控制算法。基于 PID 理论和滑模变结构控制理论设计了两种不同的系统控制器。然后利用Matlab-Simulink 建立系统仿真模型,最后根据仿真结果,验证控制算法的有效性、快速性、稳定性和抗干扰性。
(3)完成了可编程复合翼飞行器硬件系统的设计,包括主控制器选型、传感器选型、执行机构、无线模块的选型。在系统软件设计上,主要完成了软件部分的总体设计、PWM 的产生和捕获、传感器的数据采集、无线通信的数据收发和接收等的流程设计。
(4)对所设计的飞行控制系统进行实验,首先在自己搭建的平台上进行悬停测试实验,验证算法和飞控程序的实际效果。然后在实验室样机上完成了机翼对称/不对称折叠展开、机翼仿生扑动等机翼动作。最后将机翼变形和飞行器旋翼悬停结合起来,实现可变形复合翼飞行器在进行各种不同的机翼变形动作时,依旧可以稳定悬停,并进行室内外实验,实现了飞行器的稳定控制,满足飞行器设计要求。
参考文献(略)