本文是一篇软件工程论文,本文在标定方法上,提出了改进的标定方法并通过标定实验验证了改进标定法对于标定精度的提升;在立体匹配算法上,提出了基于SGM算法的改进立体匹配算法,提升了立体匹配效果和效率;设计实现了软硬件相结合的三维重建系统;最后对三维重建系统进行测试及分析,验证了本文三维重建系统的有效性。
第一章 绪论
1.1 研究工作的背景与意义
随着科技的发展,三维重建可以从三维空间中获取更多的信息,而不再局限于二维图像,这大大提高了人们对现实世界的感知和理解能力。在实际生活生产中,物体三维信息可以比二维图片信息揭示更多的定性和定量的信息,从而可以更好地反映世界的本质[1]。目前,用于确定物体的三维尺寸、位置、形状、变形和运动以及场景的三维细节的三维重建技术已成为众多科学研究和工程应用的重要工具,例如在机器视觉、医疗实践、储备工程、质量保证、安全监测、结构健康监测、3D打印、娱乐、无人驾驶交通等众多领域[2]。
术语“三维测量”是指能够获取真实三维数据的技术,即三维对象的某些属性的值,例如三维坐标、密度分布等。医学三维成像技术在CT和MRI等领域中发挥着重要作用,它们可以准确地获取被检测物体的体积像素,以及其内部结构的细节信息。
三维测量主要分为接触式和非接触式[3]两种,其中接触式比较常见的是三坐标测量仪,该仪器通过探针对物体进行三维测量。接触式测量具有普遍的缺点,如造假高昂、速度慢、测量物体限制大,因此只有在一些特殊的应用场景会使用接触式测量仪。非接触式测量又分为被动式和主动式两种方式,其中,主动式测量的代表技术是双目测距法,它通过模拟人眼的视觉系统,将左右图像特征点匹配起来,然后根据三角测距方法推算出对象的三维空间位置,但是,由于图像纹理条件不理想,这种方法存在着一定的缺陷,即左右图像的匹配困难问题。通过主动式技术,能够将激光、声音、电磁波等发射光源或能量发送至被测对象,并通过感应器(如相机、雷达等)接收反射回来的信号,从而获得物质的深度信息。主动式主要有飞行时间法[4](Time of flight,TOF)、结构光法[5]、莫尔条纹法等。其中结构光法应用较广泛,具有成本低、精度高的优点。本文研究的主要方法就是结合结构光和立体视觉的三维重建法。
..........................
1.2 国内外现状分析
在过去的数十年来,三维重建技术获得了很大的进展,并开发出很多三维测量方法,包括飞行时间法、立体视觉法[6]、结构光法和数字条纹投影法[7]等,这些方法各有不同的优缺点,应用于不同的领域中。本文主要研究的是结构光和立体视觉的三维重建,因此在下文中着重介绍这两种方法的历史和现状。
1.2.1 立体视觉研究现状
立体视觉的灵感来自人类视觉系统,它可以感知场景的深度属性。人类视觉系统从两个眼睛的略微不同的视图中获取同一个场景下的两个不同图像,并进行深度感知以解释图像,然后在大脑中形成一定的三维视觉。立体视觉有很多应用领域,如三维场景重建、物体识别、娱乐、机器人导航等。从一对图像中获取物体的深度信息,需要解决立体视觉中一个固有的问题,称为对应问题。因为在立体视觉中定义了两个不同的图像平面,所以物体在平面中的投影是相对于不同的图像坐标表示的。因此,对应问题可以定义为确定物体图像之间的坐标差。解决立体对应问题称为立体匹配。立体匹配的结果通常用视差图表示,视差图的强度表示对应图像点之间的坐标差,称为视差。
1979年,D. Marr[8]等人在研究人类视觉系统如何获取物体三维信息时,提出了一种求解立体匹配问题的算法,在各行业产生深远的影响,为立体视觉提供了理论框架。M. Bertozzi[9]等人于1998年基于立体视觉开发了一个通用障碍物和车道检测系统,用于提高行驶车辆的驾驶安全和道路安全。该系统允许检测通用障碍物(形状无限制)和通用环境中的车道(带有车道涂漆标志)位置。经过实验证明了系统在不同道路、不同车辆上的稳健性和鲁棒性。D. Murray[10]等人基于立体视觉开发了一种移动测量机器人,该机器人在构建环境网格地图的同时可以自主导航和探索环境,达到了5Hz的地图更新速度以及300cm/s的移动速度。F. Bruno[11]等人将立体视觉应用于水下三维测量方法中,实验结果表明,即使在高浑浊度的液体中,三维重建的质量依旧可靠。在医学影响成像、身体检测和病情判断中,立体视觉同样起到很大的帮助。C. Bert[12]等人将立体视觉运用于测量和评估放射性治疗后身体组织的表面轮廓,推动了放射性治疗从二维向三维的转化。SB. Goldberg[13]等人在2004年NASA火星探测任务之前,着手研究通过立体视觉技术为火星探测车提供视觉和导航支持,以便火星探测车安全地穿越未知地形。
.............................
第二章 三维重建相关理论概述
2.1 立体视觉相关理论
2.1.1 极线几何
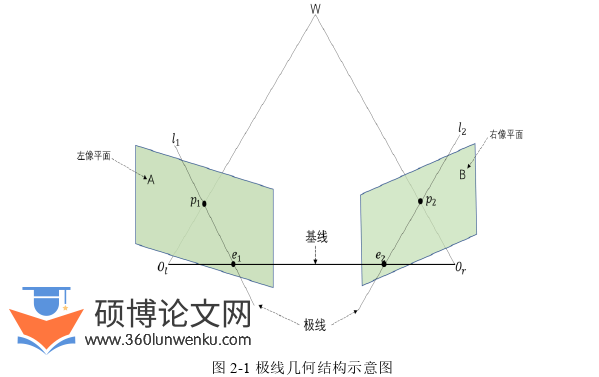
在本节中,将介绍立体视觉系统的极线几何以了解极线约束。在一对立体图像中,左右图像中的两个对应点总是在对极线上,对极线定义在立体图像平面中。图2-1显示了立体视觉系统的几何结构。这里,lO和rO分别是左右摄像机的中心。在两个相机成像平面A和B中,二维图像点1p和2p是三维点W到每个图像平面的投影。由于W被投影到每个相机的中心,因此1p和2p位于从W到两个中心的投影线上。W、lO和rO三点成一个平面,此平面称作极平面,而这个极平面与左右两个相机成像平面的交线就是对极线1l和2l。
软件工程论文怎么写
..........................
2.2 结构光相关理论
在过去几十年中,已经有很多基于结构光的三维重建技术,种类繁多,但原理类似,都是三维测量里的非接触式主动测量法。方式也类似,都是主动投影编码过的结构光到被测表面上,形成周期性或空间唯一性的标记,以此来获得被测表面的位置信息,经过解码后计算三维信息。在本文中,主要介绍结构光编码法中的时间编码法中的多频外差相移法以及格雷码相移法。
2.2.1 多频外差相移法
2.2.1.1 三步相移法
相移法[34]是一种著名的三维测量的条纹投影方法,相移法是通过投影一系列相移光栅图像编码,从而得到物体表面一点在投影仪图片上的相对位置或者绝对位置。相移法具有以下优点:
(1)测量速度快; (2)测量精度高,可以逐像素测量; (3)鲁棒性好,不容易受到环境光的影响。
如前所述,从单波长相移法获得的相位仅仅在(-π,π)的范围内。当条纹图案包含多条周期性条纹时,需要对包裹相位进行展开,才能得到连续的相位图。这意味着如果使用另一组更宽的条纹图案(例如,一条条纹可以覆盖整个图像范围)来获得没有2π不连续性的相位图[35]。第二相位图可以用来逐点展开被包裹的相位,而不需要对相位进行空间展开。为了获得更宽的条纹图案的相位,有两种方法:
(1)直接使用很长的波长;
(2)使用两个或两个以上的短波长产生等效的长波[36]。
前者并不常用,因为由于噪声或硬件的限制,很难产生高质量的宽条纹图案。因此,后者更常被采用,本节简要说明这种技术的原理。
.....................
第三章 改进立体标定算法及改进立体匹配算法·························· 22
3.1 研究动机 ······························ 22
3.1.1 研究重要性 ···························· 22
3.1.2 现有算法存在的问题 ······················· 23
第四章 三维重建系统设计与实现··························· 44
4.1 需求分析 ···························· 44
4.1.1 系统建设目标 ··················· 44
4.1.2 功能需求 ···························· 44
第五章 三维重建系统测试及分析··················· 61
5.1 测试环境 ··································· 61
5.2 测试方案 ·························· 61
5.3 功能测试与分析 ······················· 62
第五章 三维重建系统测试及分析
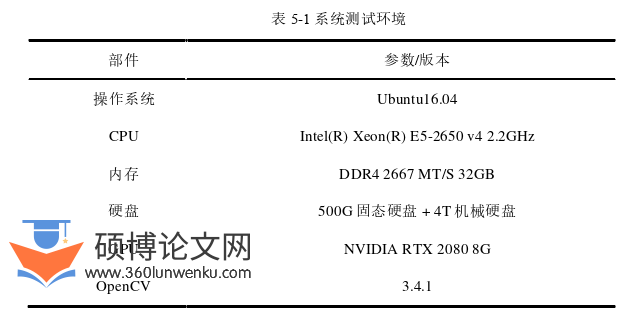
5.1 测试环境 本系统的测试环境如下表5-1所示:
软件工程论文参考
功能测试覆盖了整个三维重建系统的各个功能模块,测试整个系统是否达到系统设计中的各项功能预期。三维重建系统需要测试的功能模块主要有三个,分别是图像采集处理模块、立体标定模块以及三维重建模块,下面是对三个模块的具体功能测试内容。
............................
第六章 总结与展望
6.1 全文总结
本文研究的内容为结构光和立体视觉相结合的三维重建系统,对三维重建的全过程包括立体标定、立体匹配、系统设计与实现等进行了研究。在标定方法上,提出了改进的标定方法并通过标定实验验证了改进标定法对于标定精度的提升;在立体匹配算法上,提出了基于SGM算法的改进立体匹配算法,提升了立体匹配效果和效率;设计实现了软硬件相结合的三维重建系统;最后对三维重建系统进行测试及分析,验证了本文三维重建系统的有效性。具体研究内容如下:
1. 针对“张氏”标定法提出一种改进的标定方法,该方法分别在畸变模型中加入误差因子进行迭代更新以提高畸变参数的拟合程度,在具体的标定手法上提出了九宫格的标定方法。通过数组标定实验结果分析,本文的改进标定法有效提升了标定精度。针对SGM算法的立体匹配效果和性能不足问题,改进了SGM立体匹配算法,通过使用Census变换进行匹配代价计算以及在路径聚合方式上采用四路径聚合。经过立体匹配实验验证了本文改进立体匹配算法的有效性。
2. 针对结构光和立体视觉的三维重建方法设计实现了三维重建系统,该系统包括一套硬件系统及软件处理系统,具备三维重建全过程中立体标定、图像采集处理、立体匹配等功能。
3. 对三维重建系统进行测试和分析,经过测试,本文三维重建系统功能完备、能实现各项功能完成三维重建,符合设计指标要求。
参考文献(略)