本文是一篇机械论文,本文通过点云空间特征,分析点间距跳变、点云后沿壁下沉以及点云密度变化等特征,构建激光扫描的数学模型,通过点云聚类实现负障碍检测。最后将负障碍信息与栅格地图结合,通过全局路径规划和局部路径规划实现机器人在果园环境中的避障功能。
第1章 绪论
1.1 课题研究背景及意义
我国是一个农业大国,水果产量及种植面积位居世界前列[1,2]。然而,我国果园面临机械化水平低、劳动力不足、生产成本过高等问题,由于传统管理方式需要大量劳动力,已无法满足日益增长的生产需求[3]。果园管理的智能化、机械化是我国果园发展的必然趋势,果园管理的自动化和智能化对于提升农业生产效率、降低劳动强度、实现可持续发展具有重要意义。在农业场景中,机器人的主要应用场景有采摘[4]、喷洒农药[5]、巡检[6]、运输[7]、消毒[8],果园由于环境复杂,遮挡物较多,导致果园中的农业机械化发展滞后,难以满足目前大面积、高需求的发展趋势。
想要实现农业机械智能化,农业机器人的自主导航功能是其中关键技术[9]。传统的同时定位与建图(Simultaneous Localization and Map building,SLAM)技术在城市道路和室内等结构化环境都取得了较好的效果,但果园环境复杂,遮挡物较多,路面不平整,缺乏视觉纹理、光线易变化等不利因素,给果园环境中的建图和定位带来了巨大挑战。全球定位系统适用于麦田等空旷场景[1 0],并不适用于果园这类遮挡较多的场景。因此,针对这些果园存在的诸多困难展开SLAM技术的研究能使农业机械在果园中感知周围障碍,进行果园环境的建图与定位,能极大提高农业器械在果园中的工作效率。
农业机器人在工作时需要对周围环境进行感知和理解周围环境信息[1 1],其中对障碍物进行检测是最为重要的。障碍物根据相对于地面的高度可以分为两种:一种是高于地面的正障碍,另一种是低于地面的负障碍[1 2]。正障碍由于在地表以上,很容易被传感器检测,大量学者的研究使得正障碍检测变得稳定可靠;而在果园环境中由于种植的需要,地面存在大量负障碍,负障碍由于在地表以下,只有一小部分特征能被检测,根据Matthies等人的研究表明[1 3],正障碍物在距离传感器????????处的角度与1/????????成正比,负障碍物的角度与1/????????2成正比,这大大增加了检测难度。此外,果园环境复杂,植被遮蔽,也增加了检测难度。因此,负障碍检测一直是自动驾驶领域的一大难题[1 3–1 6]。
...............................
1.2 果园导航技术的研究现状
1.2.1 负障碍检测研究现状
在过去几十年里,学者们围绕负障碍检测方面做了大量研究。果园中大量存在的负障碍给机器人行驶带来了巨大的安全隐患,因此如何在果园中高效实时地检测负障碍就成为了亟待解决的问题。目前,负障碍检测主要有三种方案:1)基于热成像的负障碍检测方案;2)基于深度学习的机器视觉负障碍检测方案;3)基于激光雷达的检测方案。Matthies等人[1 3]提出基于热红外成像的负障碍检测方法,其主要原理是负障碍在夜间温度较周围温度低,通过热成像原理检测夜间温度较低的区域就能检测负障碍区域。但是这种方法只在夜间有较好的检测效果,且气候对其影响较大。
基于机器视觉的方案以深度相机作为主要检测传感器,目前以深度学习作为主流方案,Feng等人[1 8]设计了一种具有双重语义特征互补融合的分割网络对路面不同负障碍进行分割,Koch等人[1 9]将沥青路面负障碍区域几何特征与无缺陷处路面进行对比,以此对缺陷区域进行检测。Dhiman等人[2 0]设计了两种立体视觉分析方法和两种深度学习方法对坑洼进行检测。许多学者都采用深度学习和神经网络的方法对负障碍检测[2 1–2 4]。基于机器视觉的方法易受环境光线影响,在夜晚环境难以正常工作。Silvester等人[2 5]和Thiruppathiraj等人[2 6]在智能手机上使用卷积神经网络来检测路面损坏。虽然精度很高,但检测速度相对较慢。Kang等人[2 7]提出了一种环境感知算法,该算法将单线激光雷达与视觉相结合,以应对识别小目标的挑战。然而,该方法的检测性能较差,无法适应果园的复杂环境。
...................................
第2章 基于雷达倾斜安装的负障碍检测方法研究
2.1 引言
本章主要设计了一种倾斜安装固态激光雷达的负障碍检测系统,分析了果园中负障碍检测难点以及倾斜安装固态雷达相较于传统安装方式的优势,详细阐述负障碍检测算法的流程和原理。
首先,分析了在果园中负障碍检测的难点,提出激光检测负障碍的模型,并提出针对这些难点相应的解决思路。
其次,分别比较了倾斜安装激光雷达与直立安装激光雷达在负障碍检测中的区别和机械旋转式激光雷达与固态激光雷达的区别,提出了倾斜安装固态激光雷达的地面补盲方案,详细阐述了倾斜安装固态激光雷达的原因及在负障碍检测上的优势。
最后,在倾斜安装固态激光雷达的基础上,基于负障碍点云的空间特点,提出了负障碍的检测算法。首先对负障碍点云空间特点进行分析,将其与水平地面点云进行对比,推导出激光扫描负障碍的数学模型,通过数学模型与实际扫描的点云进行匹配,实现负障碍检测。
.............................................
2.2 果园中负障碍检测难点分析
区别于正障碍,负障碍是一类低于水平面的坑洼、沟壑等障碍的统称。Matthies等人[1 3]的研究表明,距离传感器R处正障碍物的夹角与1/R成正比,负障碍物的角度与1/R2成正比,因此负障碍检测难度要远大于正障碍。下面将对果园中负障碍检测难点进行详细阐述。
本文是针对果园环境中的负障碍检测,由于种植的需要,果农通常需要在地面开槽挖沟,这就导致果园机器人需要对负障碍实现精准检测和避障。
果园环境大多为非结构或半结构化环境,这类环境道路崎岖,杂草丛生,不利于负障碍检测。在绪论部分已经提到,目前负障碍检测有三种主流方法:(1)基于夜间热成像的检测方法;(2)基于深度学习的机器视觉检测方法;(3)基于激光雷达的检测方法。夜间热成像依靠热成像传感器,其原理是在夜间时,负障碍中的温度低于周围环境温度,通过对地面温度进行感知,从而实现负障碍检测。然而该方法只能在夜间有较好的效果,且检测精度受到温度、季节气候等诸多环境因素变化影响,其检测鲁棒性或有待提高。机器视觉方案是目前最为主流的检测方法,其原理是立体相机拍摄图片,通过图片分割等方法对图片进行学习处理,实现对负障碍的检测。然而,视觉方案对环境光照要求较高,在果园这种光线不稳定的复杂场景中,其检测效果不佳,或有较高的漏检和误检率。
许多学者还在不同平台安装传感器对负障碍进行检测,如将激光雷达或摄像头安装在无人机上,在高空对地面扫描,该方法可以弥补路面检测距离的限制和负障碍观测角度的限制等问题。但该方法只适用于视野开阔的野外场景,由于果园中树木的遮挡,该方法几乎无法正常工作。同时,果园中由于树木遮挡导致GPS等卫星信号弱,也增加了负障碍检测的困难度。
......................................
第3章 果园地图构建及负障碍避障算法研究 ........................ 31
3.1 引言 .................................... 31
3.2 占据栅格地图及负障碍信息更新 ...................... 31
第4章 果园中机器人导航实验研究及数据分析 ................................ 43
4.1 引言 ....................................... 43
4.2 实验主要仪器及平台介绍 ............................ 43
第5章 总结与展望 ............................. 56
5.1 主要研究结论 ...................................... 56
5.2 未来与展望 ........................... 57
第4章 果园中机器人导航实验研究及数据分析
4.2 实验主要仪器及平台介绍
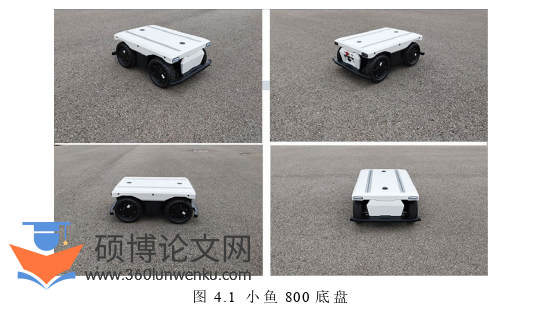
(1)云乐智能-小鱼800底盘
该底盘主要用于乘载上位机、雷达以及IMU等硬件,同时为机器人提供移动转向等功能。该底盘为四驱四转的阿克曼底盘,四驱能够提供强大的动力,在果园中的崎岖道路也能正常行走,同时四转能够提供灵活的转向,果园中道路狭长,较小的转弯半径十分有利于在道路尽头进行转向。图4.1是小鱼800底盘实物图。
机械论文参考
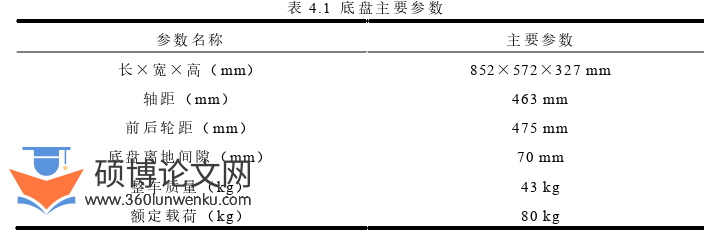
该底盘由四个300W永磁同步电机驱动,最大负载80kg,续航里程达35km,该底盘提供can总线通信接口,能够实现由上位机控制底盘运动。底盘主要参数如表4.1所示。
机械论文怎么写
.............................
第5章 总结与展望
5.1 主要研究结论
农业机械智能在农业场景中具有高效率和高精度的优势,在经济作物和粮食作物中都具有巨大发展潜力。但目前农业机械存在低端产品过剩,而高端产品不足的问题,农业机械自动化、智能化成为亟待解决的问题。本文针对果园场景提出了基于地面点云空间几何特征的负障碍检测与避障技术,提高了农业机器人在果园中的安全保障,为将来农业机械智能化提供一定技术参考。
本文通过点云空间特征,分析点间距跳变、点云后沿壁下沉以及点云密度变化等特征,构建激光扫描的数学模型,通过点云聚类实现负障碍检测。最后将负障碍信息与栅格地图结合,通过全局路径规划和局部路径规划实现机器人在果园环境中的避障功能。 本文主要研究内容及研究结论如下:
(1)通过理论分析,得出不同激光雷达在不同安装方式下的数学模型,分析每种场景下雷达的最远探测距离,盲区范围以及点云密度,分析得出增大倾斜安装角度能够减小盲区范围,增大点云密度,垂直视场角大的激光雷达能够增大最远探测距离。分析地面负障碍点云空间几何特征,得出负障碍相较于水平地面有以下三种特征:1)相邻点间距跳变,2)负障碍后沿壁点云密度增加,3)负障碍后沿壁点云高度下沉,根据这三种特征,得到按距离划分的18个区域的激光扫描数学模型,将实际点云信息与数学模型进行匹配,实现负障碍的实时检测。
(2)通过Bresenham算法将负障碍信息与栅格地图坐标对齐,得到包含负障碍的栅格地图;在MATLAB对已构建的地图进行路径规划,本文采用Voronoi Planner全局路径规划,该算法能够确保整条路径距离障碍物最远,保障了机器人在运动过程中的安全,在MATLAB中对30×20m的场景进行全局路径规划耗时237ms。在全局路径规划的基础上,采用DWA算法进行局部路径规划,机器人从起点到终点耗时35s。
参考文献(略)