本文是一篇机械论文,本文主要以帮助膝关节关节炎患者及具有下肢运动功能障碍人士重新获得行走能力为目标,设计了一款下肢膝关节外骨骼机器人,进而对外骨骼机构进行了运动学与动力学建模及分析,并且基于MATLAB 9.0软件平台对膝关节五杆机构进行了详细的优化设计及运动学研究,验证了膝关节外骨骼具有良好的运动性能及结构设计的合理性;
第一章 绪论
1.1 研究背景及意义
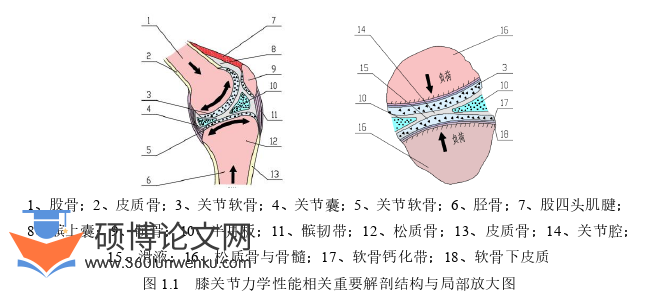
目前,科技的发展可谓日新月异,社会在不断进步,经济、医疗水平也在逐步提高,人们对身体健康也越来越重视,在自身健康问题方面花费的资金越来越多,从而使得人口越来越向老龄化的趋势发展。我国的人口老龄化问题也越来越严峻,到2018年年底,60岁之上的老年人超过了2.5亿[1]。伴随着“老龄化”、“肥胖”与“残疾”人口的不断增多,膝关节关节炎患者也随之增多。膝关节作为人体内最大的关节(如图1.1所示),在下肢运动过程中,起着十分重要的作用[2]。膝关节不仅承担人体自身的重力,还受到来自大地的冲击力,包括大腿与小腿的屈伸运动,可以发现膝关节都是最直接的参与者[3],因此,其发病几率比人体其他关节要高得多。根据调查显示,我国患有膝关节关节炎疾病的患者大约占全国人口总数的4%[4],且65岁以上的老年人尤为居多。
机械论文怎么写
膝关节关节炎病症一般表现为膝盖有明显的红肿且伴有疼痛、在坐下、站立与上下楼梯时膝关节部位伴有强烈的疼痛与不适感[5,6]等,从而严重影响了患者的生活质量。由于目前膝关节关节炎的治疗手段具有局限性,并不能使患者完全康复,摆脱病痛困扰,所以,康复辅助治疗器具被寄予厚望,得到了人们愈发广泛的关注。但一些更高精度、更高效的康复医疗设备受限于使用场景,患者需定期性的到医院或康复诊疗中心进行康复训练、治疗,这种治疗方式无法满足患者对于行走的渴望,因此,可穿戴式下肢外骨骼机器人逐步走进大众视野。其中膝关节免荷矫形器[7,8]在治疗膝关节骨关节炎时极大的减小了膝关节受损部位的载荷,有效的减轻了病患的痛苦。但文献[9]与文献[10]指出上述器具不具备改变人体下肢力线,且穿戴后下肢行走速度变慢,步态也随之发生改变。因此,尽管穿戴矫形器会减轻一部分膝关节的负载,但其仍难以满足日常生活中膝关节关节炎患者对辅助器具的需求。
............................
1.2 国内外研究现状
1.2.1 国外研究现状
使用外骨骼来提高人体运动能力的设想起初开始于1890年俄国的Yagn所申请的专利[10]。该机构由两片弓形弹簧构成,佩戴在人腿两侧通过弹簧将人体自身重力传到大地,减轻了人体负担,如图1.2所示。从1960年开始,欧美等一些发达国家开始对外骨骼开展深入研究,主要目的是为了提高人体自身负荷能力。
上世纪90年代末,外骨骼机器人的研究取得了长足进展。人体在穿戴美国麻省理工学院研制的下肢外骨骼机器人[14]后,可以在背负36kg重物的状态下以1m/s的速率行进,并且将百分之八十的重力传到大地,如图1.4所示。该外骨骼机器人在髋关节处有三个DOF,膝、踝关节处各有一个DOF,采用可变阻尼的储能弹簧来驱动各关节运动[15]。美国Sarcos公司研发的XOS-1、XOS-2外骨骼机器人均使用液压驱动方式[16],如图1.5所示的XOS-2外骨骼机器人,全身共有23个驱动关节,士兵穿戴之后双手可托举起90kg的物体,单手可平举起20kg的物体,且单手可劈断7.62cm厚的木板。
本世纪初,国内一些科研院所与公司等开始对下肢外骨骼展开研究。中国科学技术大学及中科院合肥智能机械研究所的葛运建、余永等人[23,24]在2004年最早展开了对下肢外骨骼机器人的研究,并且在2010年成功推出第二代试验样机,如图1.14所示。其中单边腿存在七个DOF,髋关节、踝关节各有三个DOF,膝关节存在一个DOF。该外骨骼采用电动缸驱动各关节运动,运动过程中通过监测足底压力变化来推断穿戴者的动作意图[25,26]。2008年,中国人民解放军海军航空大学推出一款能量辅助外骨骼NAEIES[27-29],该外骨骼以钢丝拉索的方式输送动力,在大腿至髋关节处用气动弹簧相连,具有较好的支撑性。
.............................
第二章 膝关节外骨骼机器人仿生研究原型
2.2 人体下肢运动机理研究
从解剖学上来讲,正常人体下肢运动时主要是依靠骨骼、骨骼肌肉与各个关节之间的相互作用来完成的;骨骼的主要功能是支撑人体和运动,骨骼肌肉的主要功能是下肢运动的动力源,关节的主要功能是作为各个骨骼的连接部分[39]。然而对于具有下肢膝关节运动功能障碍的人士而言,上述三者之间的相互作用减小甚至失效,因此,对于下肢膝关节外骨骼机器人进行结构设计之前,对人体下肢运动机理的研究是非常重要的。
2.2.1 人体下肢各关节运动范围研究
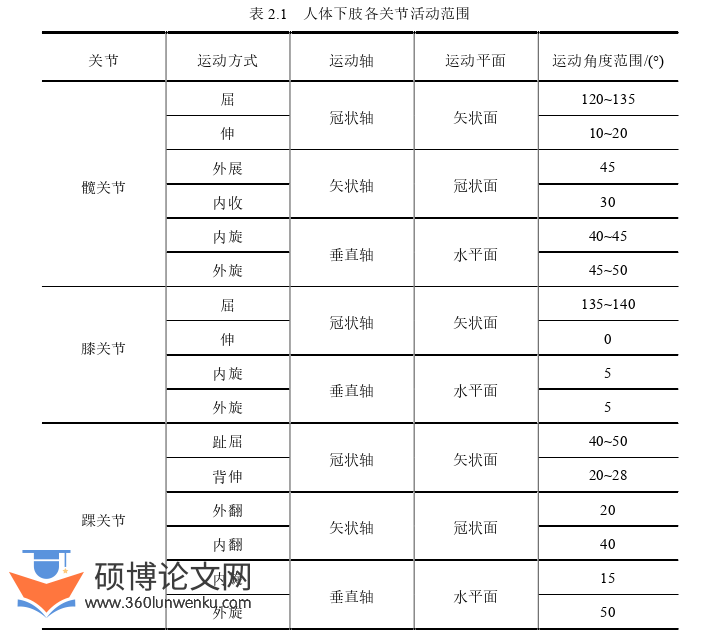
通过对人体下肢运动时各个关节的运动机理与自由度分析可知,人体单侧下肢在运动时共有7个DOF,基本的运动形式为:缓冲、蹬伸与鞭打,分别表现为髋关节围绕人体三个方向的基本轴作屈伸、内收和外展运动,膝关节绕冠状轴做屈伸运动,踝关节围绕人体三个方向的基本轴作屈伸、内收、外展、外旋及内旋运动[40],具体参数见表2.1。
机械论文参考
.................................
2.3 外骨骼研究原型仿生设计
2.3.1 设计要求
(1) 仿生性
下肢膝关节外骨骼机器人的设计需考虑机构的仿生性,在穿戴时要保证不影响人体下肢的正常行走,尽可能的将外骨骼拟人化。首先要确保各个关节的自由度和转角范围与人体下肢相匹配,满足人体下肢的运动空间,降低对人体正常运动的影响,在运动时能够使得外骨骼与人体协调一致,从而保证穿戴的舒适性与灵活性。
(2) 兼容性
设计外骨骼时应考虑对于不同的个体,要具有一定的包容性,能够实现不同身材穿戴的要求,即大腿杆与小腿杆在长度上可以进行一定范围内的调节。
(3) 安全性
外骨骼的主要功能是辅助膝关节疾病患者行走、站立,在日常生活中帮助患者达到一个正常的基本运动,减小人体负担,起到一个分承人体重力的作用,所以在对其结构设计时,应该将如何保证穿戴者安全放在第一位。
(4) 轻量化
人体在穿戴外骨骼行走时,外骨骼不光对人体起到一个支撑作用,在运动过程中还会受到来自大地的冲击力,这就需要外骨骼具备一定的刚度来应对冲击,但外骨骼对重量要求比较敏感,因此,外骨骼在选材时不仅要满足其所需刚度,更要达到轻便、灵巧的功能。
........................
第三章 膝关节外骨骼机器人运动学及动力学研究 .......................18
3.1 引言 .............................. 18
3.2 机构位姿描述 ............................... 18
3.3 空间直角坐标系之间的齐次变换 ............................... 19
第四章 膝关节外骨骼仿生五杆机构优化设计与运动学研究 ...............30
4.1 引言 .................................... 30
4.2 运动学建模与分析 ............................... 30
第五章 膝关节外骨骼机器人多体动力学仿真研究 .......................44
5.1 引言 .................................. 44
5.2 基于ANSYS Workbench的注意事项及分析流程 ................... 44
第五章 膝关节外骨骼机器人多体动力学仿真研究
5.2 基于ANSYS Workbench的注意事项及分析流程
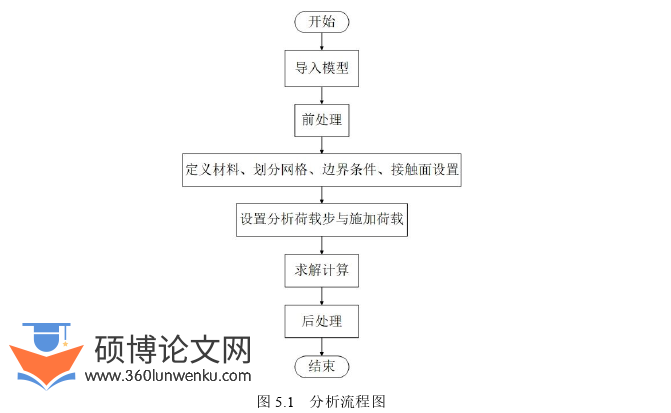
ANSYS Workbench有限元软件具有十分强大的功能,且人机交互体验良好,基于这个软件平台可以实现从开始建模到后续仿真的研究工作,为研发人员节省了大量时间,加快了研究进程[69]。在进行有限元分析时,求解过程会占用很多的计算资源,并不是模型结构越复杂求解结果越准确,因此在构建模型时要尽量适当准确地对其进行简化;在对有限元模型进行设定边界条件与施加载荷时,要与实际情况相符合;ANSYS Workbench平台具有自动化分网格的功能,在进行有限元分析时节省了大量时间,但自动划分的网格往往不够准确,需细分网格的地方还需重新手动划分,因此,需结合实际情况具体分析采用何种方式划分网格。ANSYS Workbench分析流程一般分为前处理与后处理两部分,如图5.1所示,下面进行详细阐述:
(1) 前处理
前处理一般分为搭建几何模型、构建有限元模型、设定边界条件与施加载荷几部分。搭建几何模型一般通过专业的三维建模软件如:Proe、UG NX、Creo、Solidworks等;构建有限元模型一般将三维建模软件中的模型导入,然后进行网格划分、检查零部件是否缺失与网格密度等操作;设定边界条件与施加载荷主要是将有限元模型按照实际情况进行约束,然后施加力、位移等。
(2) 后处理
后处理一般为将有限元仿真结果的数据与云图进行提取与处理,对求解结果进行详细分析,并结合实际情况,从而反映出所求解问题的具体状况。
机械论文参考
.................................
第六章 总结与展望
6.1 总结
近年来,对下肢外骨骼机器人的研究已掀起一股浪潮,其研究的意义在于为了减轻人体负担,从而使工作效率大幅提高,在助老、军事、救援、运动等领域潜力巨大。随着我国肢体残疾人数的上涨和人口老龄化的发展,对兼具仿生通用性、可长久舒适穿戴、高性价比、结构轻巧、操作简单等优点的膝关节外骨骼作为膝关节骨关节炎“普通”患者的康复辅助器具的需求,将是巨大的。
本文主要以帮助膝关节关节炎患者及具有下肢运动功能障碍人士重新获得行走能力为目标,设计了一款下肢膝关节外骨骼机器人,进而对外骨骼机构进行了运动学与动力学建模及分析,并且基于MATLAB 9.0软件平台对膝关节五杆机构进行了详细的优化设计及运动学研究,验证了膝关节外骨骼具有良好的运动性能及结构设计的合理性;在此基础上,基于ANSYS Workbench 17.0软件平台,对膝关节外骨骼机器人的各部分结构及人-机并联系统进行多体动力学分析,从而得到了在行走过程中下肢膝关节及膝关节外骨骼机器人各部件的受力情况。
主要研究成果及结论如下:
(1) 下肢膝关节外骨骼整体方案设计。首先介绍了人体下肢运动的生理特性,将中国成年男女的人体尺寸作为参照,确定了下肢膝关节外骨骼的尺寸大小及活动范围;依据国内外已研究成功下肢外骨骼的特点,确定了结构设计方案及变刚度控制方案,使得外骨骼结构设计更加合理、质量轻盈、承重能力强、穿戴舒适性更高。
(2) 对下肢膝关节外骨骼进行简化,开展运动学及动力学研究。采用D-H法对下肢外骨骼进行运动学研究,得到外骨骼各构件之间关节角与末端脚尖的空间相对位姿关系,求解出脚部运动学方程,基于此,对膝关节外骨骼机器人开展运动学仿真分析;采用拉格朗日法对下肢外骨骼机器人进行动力学研究,分析下肢外骨骼各构件之间的动力学关系及各关节的驱动力矩。基于MATLAB 9.0软件平台对膝关节五杆机构进行详细的运动学研究,采用闭环矢量法对其构建运动学模型,对系统奇异形位、可操作度、灵巧度、工作空间包容性进行详细研究,并提出一种评价该仿生机构的全局性工作空间灵巧度的新型综合评价指标,以此为优化目标,对系统结构参数进行结构优化及数值仿真,结果表明该机构具有良好的仿生灵巧包容性。
参考文献(略)